hello ,
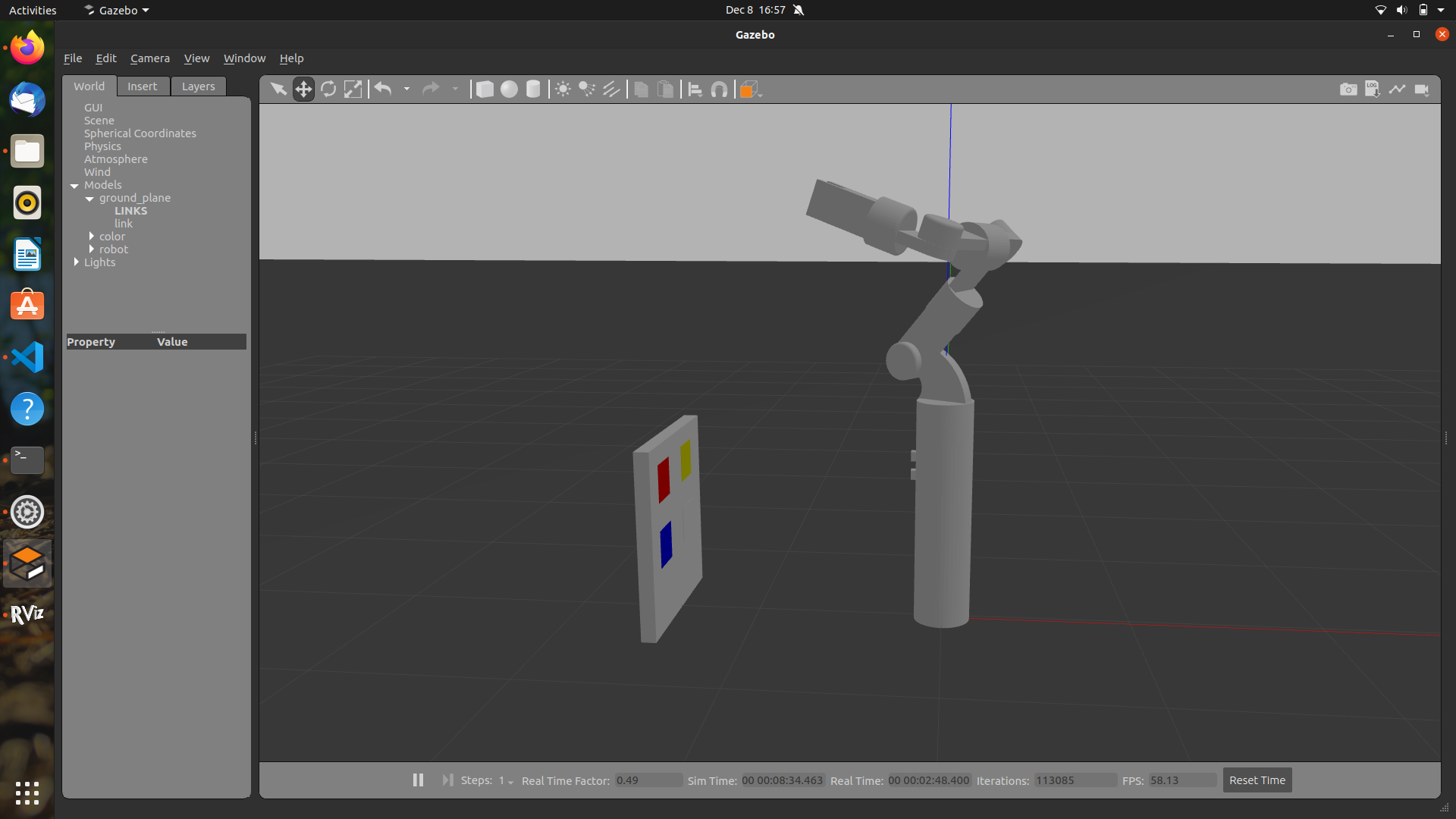
I am trying to make a manipulator which will recognize a particular color and the gripper will point to that position in gazebo ,but i dont know to how find the distance (position and orientation) of that color with respect to base_link.i have camera and depth camera attached to the base of manipulator