Hi everyone.
I am trying to do localization by using AMCL, currently the movement of the robot is guaranteed by a python script which converts the cmd_vel command sent from the keyboard (turtlebot_teleop keyboard_teleop.launch) into motion. The other node that I launch is: amcl_setup.launch, but the robot is unable to locate itself.
I wanted to know if I’m forgetting some important node or have I made some mistakes?
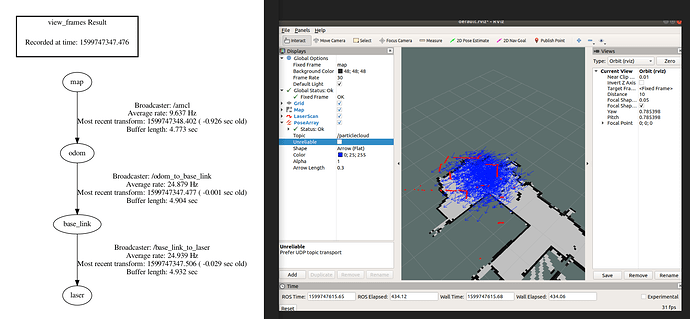
Below I have typed the nodes amcl_setup.launch and amcl.launch, the TF tree and the RVIZ screen where you can see that the laser and AMCL are not working properly.
Thanks everyone.
amcl_setup.launch:
<launch>
<!-- Run the map server -->
<arg name="map_file" default="$(find robot_controll)/maps/my_map.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" >
<param name="frame_id" value="map"/>
</node>
<!-- YDLIDAR_NODE -->
<node name="ydlidar_node" pkg="ydlidar" type="ydlidar_node" output="screen">
<param name="port" type="string" value="/dev/ttyUSB0"/>
<param name="baudrate" type="int" value="128000"/>
<param name="frame_id" type="string" value="laser"/>
<param name="low_exposure" type="bool" value="false"/>
<param name="resolution_fixed" type="bool" value="true"/>
<param name="auto_reconnect" type="bool" value="true"/>
<param name="reversion" type="bool" value="true"/>
<param name="angle_min" type="double" value="-180" />
<param name="angle_max" type="double" value="180" />
<param name="range_min" type="double" value="0.1" />
<param name="range_max" type="double" value="16.0" />
<param name="ignore_array" type="string" value="" />
<param name="samp_rate" type="int" value="9"/>
<param name="frequency" type="double" value="2"/>
</node>
<!--- Run AMCL -->
<include file="$(find robot_controll)/launch/amcl.launch" />
<!--- TF -->
<node pkg ="tf" type="static_transform_publisher" name="odom_to_base_link" args="0.0 0.0 0.0 0.0 0.0 0.0 /odom /base_link 40"/>
<node pkg ="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" />
<launch>
<arg name="use_map_topic" default="false"/>
<arg name="scan_topic" default="/scan" />
<node pkg="amcl" type="amcl" name="amcl">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>