Hi,
I am currently working on the project for ROS Basics in 5 Days (Python) course. I have finished publisher and subscriber chapters and working on the wall follower robot (Project SECTION 1). I was stuck on its motion for a while and realized that the scan values seem to have an error. Please refer attached picture below and my explanation below the picture.
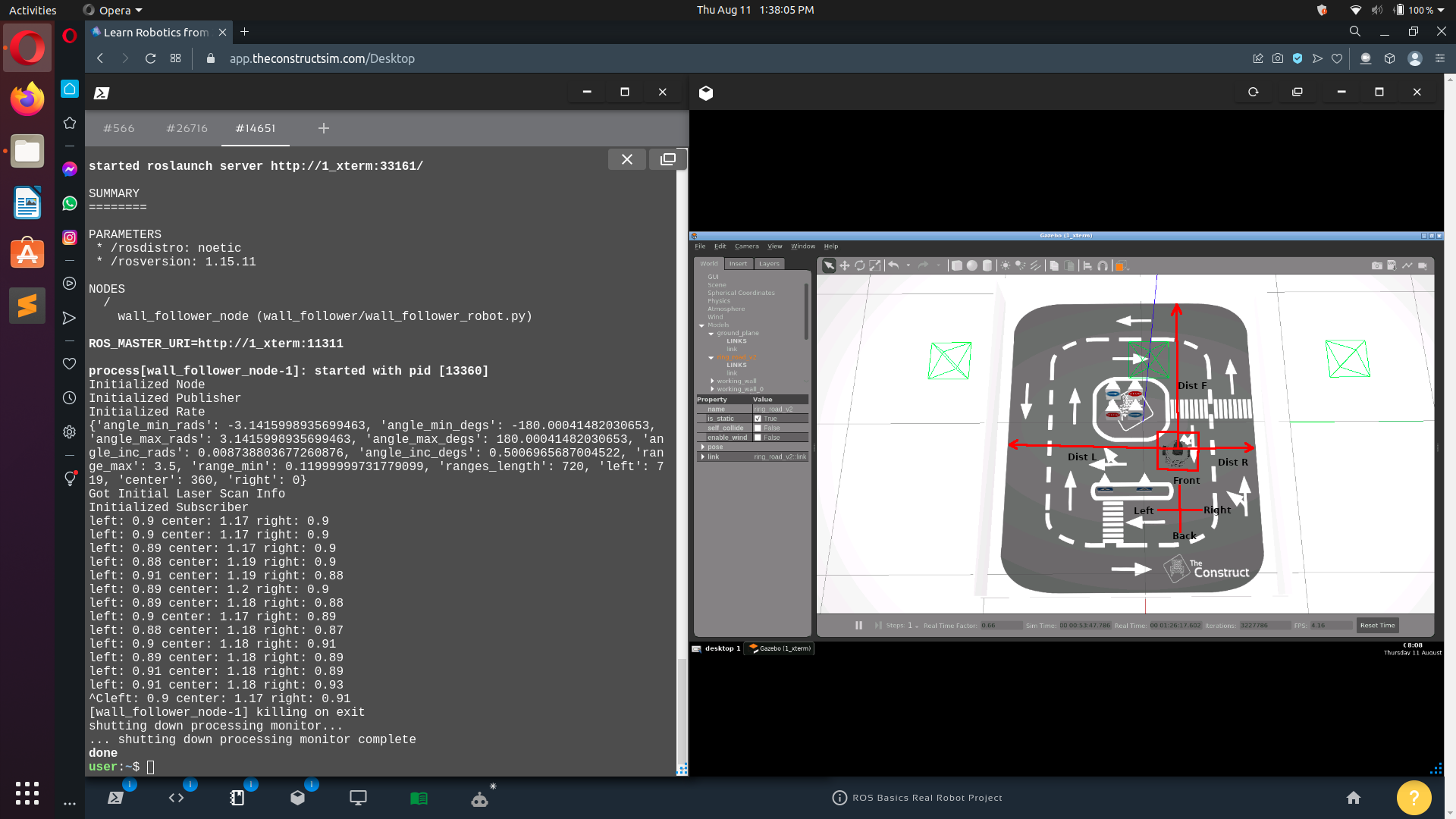
As you can see from the ROSDS environment image,
The robot (in red square box) on the arena is stationary(not moving) during this test.
On my wall follower program I am just printing the scan values of 0, 360, 719 which are right, center and left.
You can notice that left and right readings are quite similar and center shows a distant range value.
Assuming the center range value is correct, there is no way that left and right measurements can be almost similar.
The robot has at least 3 times the space on its left compared to the space on its right.
So left should be around 3.0 (or less) while right is around 0.9 meters.
But if the distance on right is about 0.9 the front should be around 2.5 meters.
The range of the laser scanner as reported, is between 0.12 meters and 3.5 meters.
The laser scan readings, clearly, seems to be incorrect.
Could someone help me out in this issue? Why are the laser scan readings incorrect?
Thanks,
Girish Kumar Kannan