Hey Sir, I’m working on the project ROS MANIPULATION IN 5 DAYS and I’m stuck in the first part
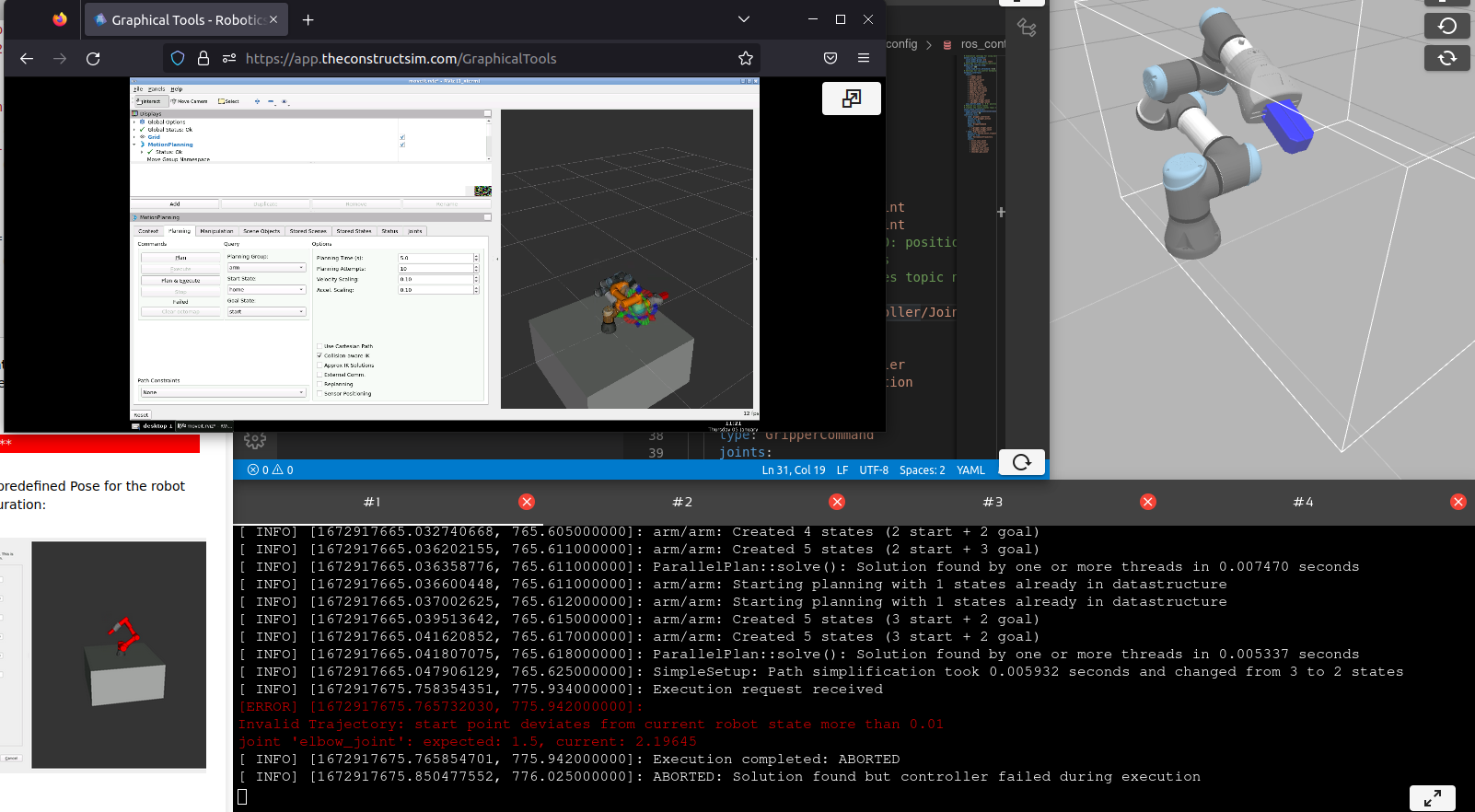
here is the command line
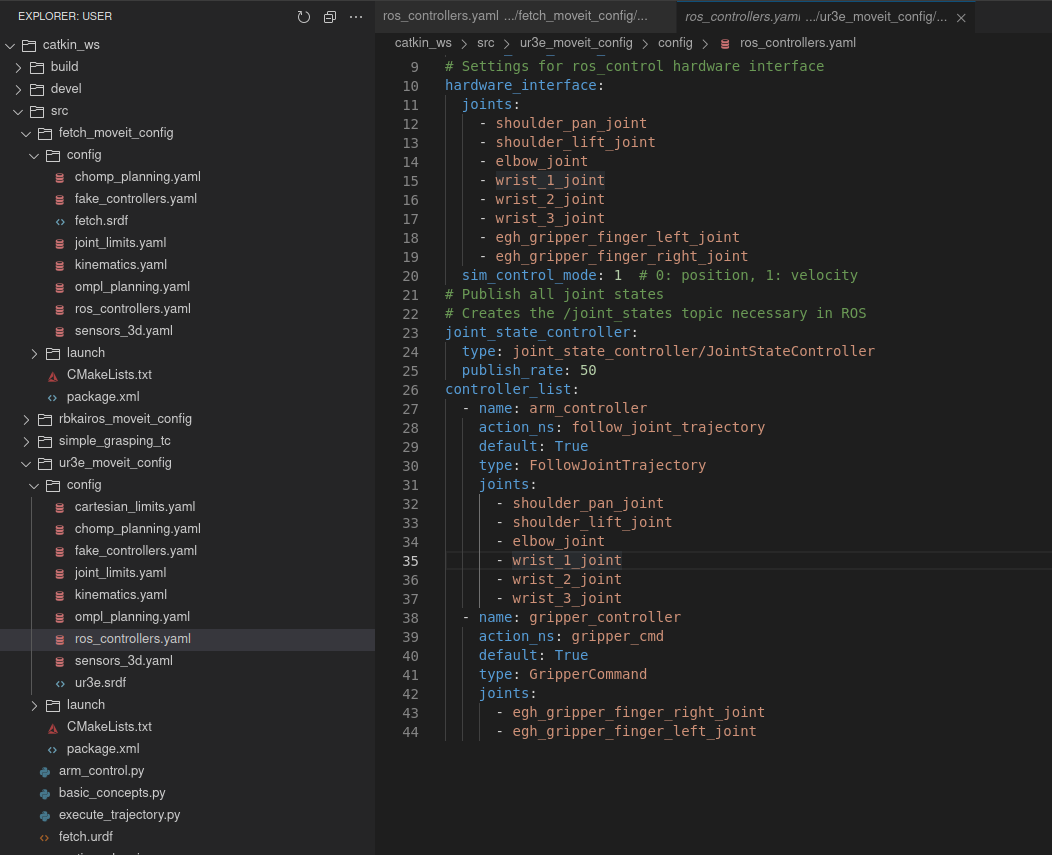
the ros_controllers file
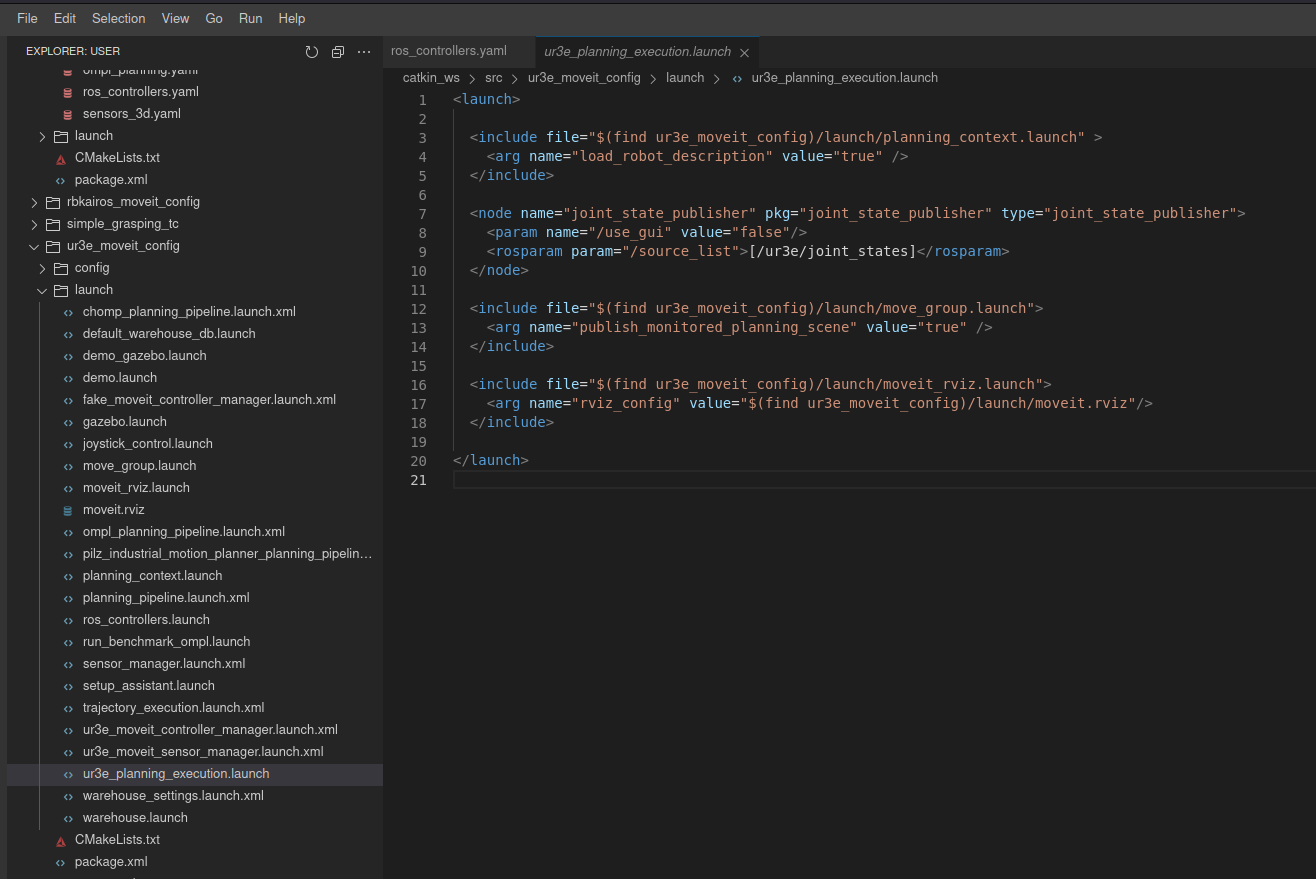
ur3e_planning_execution file
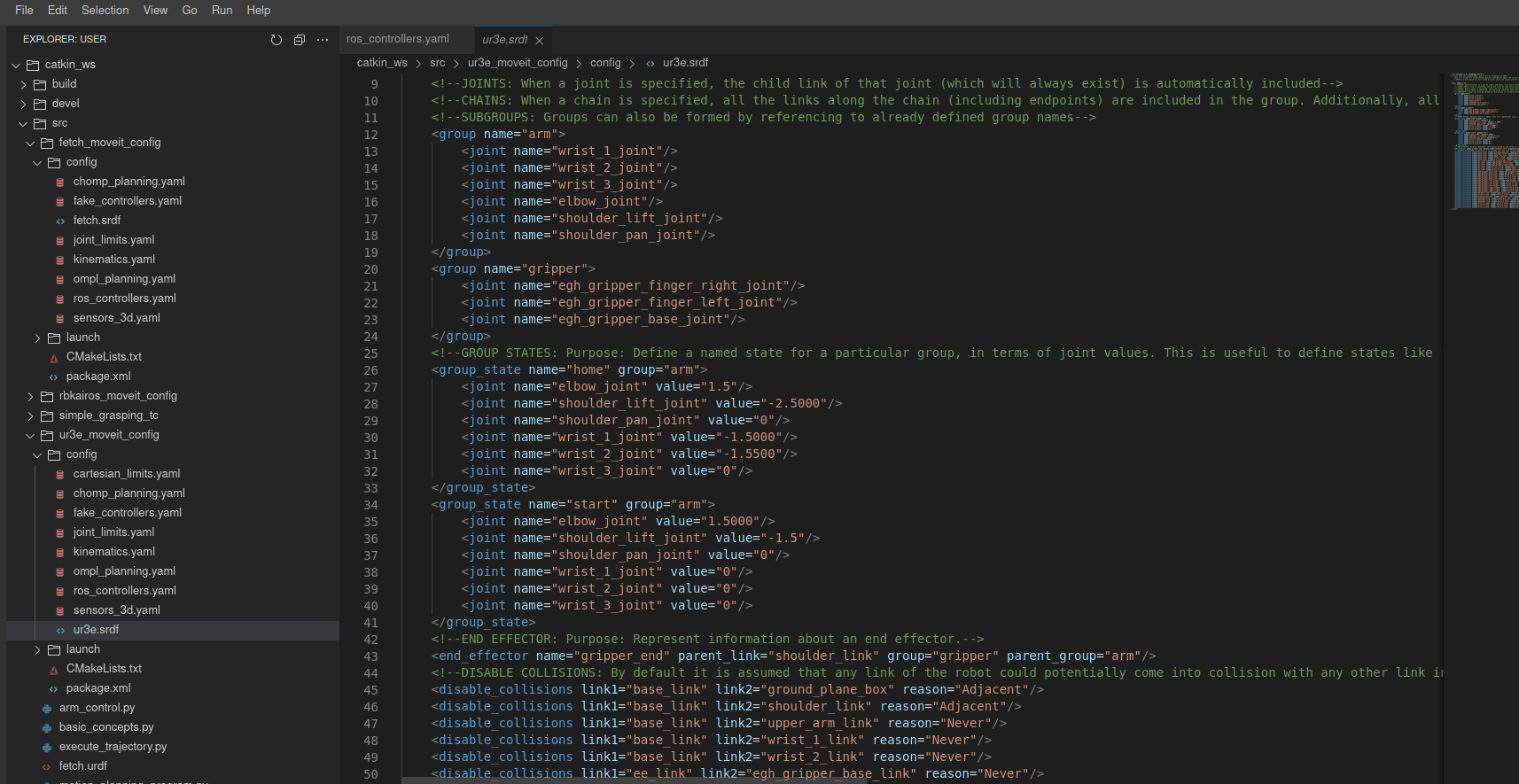
and finally the ur3e.srdf file to have an idea about my home pose
I got the following error : “Invalid Trajectory: start point deviates from current robot state more than 0.01
joint ‘elbow_joint’: expected: 1.5, current: 2.19645”
It looks like the error is that the robot is not where MoveIt thinks it is. Are you able to send any poses? or do they all fail?
To check whether the robot controller works, you can do it with rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller and move the joint sliders in the GUI that appears.
If not, another idea is to simply kill MoveIt and launch it again.
Hello @eyanagazi ,
Please send me your Moveit package to aezquerro@theconstructsim.com
Also, when does this error appear? Is it when trying to plan & execute a trajectory using Moveit’s GUI? Is it when running a specific command in the shell? Could you provide some additional context on this?
Thanks in advance,
Shutting everything down and restarting solved the issue for me.
This topic was automatically closed 3 days after the last reply. New replies are no longer allowed.