In Chapter 4: Arrays and Pointers, the ratio of laser beams to the direction parameter of the RosbotClass::get_laser() function is incorrectly drawn.
The figure shows that 180 is the right side, and 540 is the left.
In fact, the opposite is true.
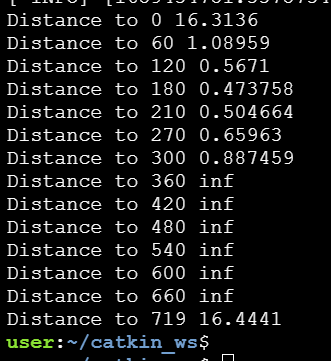
At this position, when the robot is standing with its left side to the wall, we get the following values of the RosbotClass function::get_laser()