i’m just stuck at exercise in teb local planner course car-like exercise.
can you give me solution??
i’m just stuck at exercise in teb local planner course car-like exercise.
can you give me solution??
Hello!
First of all, sorry for the late reply. Can you please provide more information to us? Which exercise are you stuck at? What is the part/s that are giving you problems?
Best.
Hi Alberto,
For exercices 3.1 3.2 3.3 3.4 3.5 …
the target is to setup a car-like robot.
To do this it is explained that we have to modify teb_local_planner.yaml and adapt it to car requirements in order to be able to drive a car-like robot with Ackermann command (already embedded and in the simulation.)
In Unit 1: Set Up the Navigation Stack,
we learned how to create an environment with husky robot adding/using a the localization and mapping nodes (amcl +gmapping).
We also added the configuration files in order to adapt the planners (local and global) and the costmaps(local and global) and finally we added the teb_local planner to infer in the local_planner of the navigation stack and have the teb features.
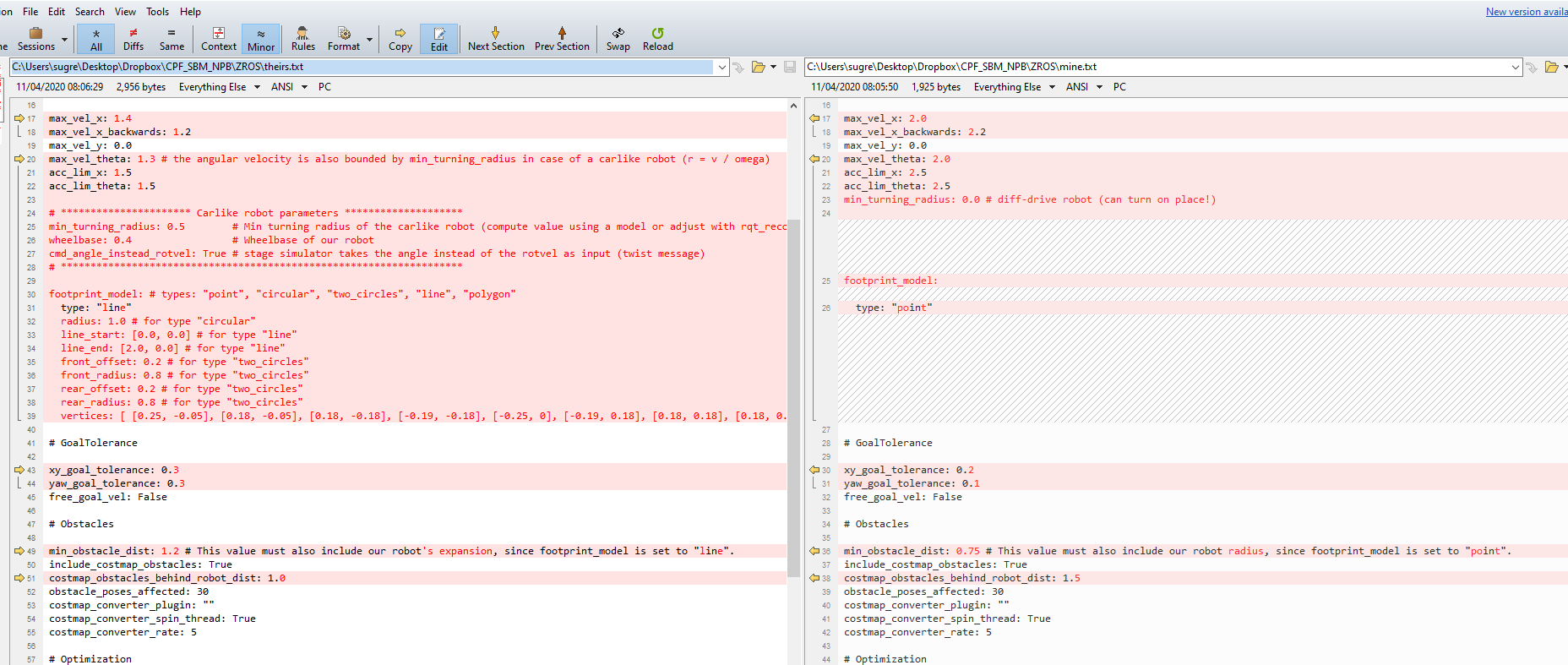
I’ve compared the the yaml files refering for teb_local_planner.yaml from :
The major diferences is in the footprint and the odom topic (it make sense indeed).
In other words if i just adapt the yaml file for teb in the package we created in unit 1, I am ready to go with car-like robot and play around(including the optimization…) ?
Am i right ? Am i in the correct path ?
Sugreev
Hello @r2s.sugreev,
Yes, you are on the right path  However, don’t forget about other parameters like the min_turning_radius, which is also very important.
However, don’t forget about other parameters like the min_turning_radius, which is also very important.
Best,
Alberto,
I am currently making an outline for this course for my students getting ready to go through this in February. I too am a bit lost on this section. Is there a solution guide for the TEB course? It would be great help if solution guides exist at all for any of the courses for instructors using this curriculum. As it is I have to go through and try to create that. When the exercises are as vague as they are in Exercise 3.1, 3.2, and 3.3 that is a little hard to do.
Some of your previous courses I have been through have Youtube videos at least that go into a bit more detail. This one does not.
Best regards,
Mike Wescott
Hello @mewescott ,
No, this course doesn’t provide the solutions, unfortunately. This is one of the courses from the curriculum that has not been properly updated yet. We will update it in the next months (adding solutions and improving the contents), but it won’t be before February for sure.
Most of our courses do provide solutions though. In case you are interested in TEB Planner or autonomous cars, I’d suggest you have a look at the RB-Car course from Robotnik, which also uses the TEB Planner and it does include solutions: Learn Robotics from Zero - Robotics & ROS Online Courses
Best,
Thanks for the feedback. Can you please clarify what they are supposed to modify here (what files and where they are):
Modify all the parameter files that need to be modified in order to support the new DBW MKZ simulation. For that, you’ll need to have a look at the topics and frames that this new simulation uses, and modify them in all the parameter files where they are being used.
HINT: For instance, the /odom topic is now called /catvehicle/odom, and so is the frame associated with the odometry of the robot.
Is there any update to creating solutions for this Unit 3 exercises 3.1-3.3? I made changes to the yaml files to change the /odom topic to /catvehicle/odom and frame /base_link to /catvehicle/base_link
When I try to launch move_base, I keep getting the error:
[ WARN] [1668655785.543171147, 3459.670000000]: Timed out waiting for transform from catvehicle/base_link to mapto become available before running costmap, tf error: canTransform: target_frame map does not exist… canTransform returned after 0.1 timeout was 0.1.
This unit is completely vague when compared to the previous unit. Can you please provide more instruction on this?
Hello @moyboyufl ,
I will establish this as a priority now. I will do an update to the course, adding also the solutions. It will be ready by the end of next week. I’ll let you know once it is published.
@albertoezquerro ,
Thanks so much for the quick response! I look forward to see the updated course!
Hello @moyboyufl ,
The update of the course is already done. It is currently being proofread, so it will be published next week. The update will include:
@albertoezquerro
I’m still not seeing any change to the exercises. Have the changes been published yet?
I’m still not seeing sufficient instruction for Units 3 and 4.
Thanks!