Hello @professor.herman,
could you explain your problem in more details?
Thanks
Salvatore
Doing Python3 for Robotics. Solution for Exercise 2.2 (see screenshot) doesn’t work. It produces one correct value and two as “inf” (see screenshot). The two statements, “The laser value received is: inf” should have numerical values. But I also asked if this is the correct venue to give feedback on The Construct courses.
Hello @professor.herman.
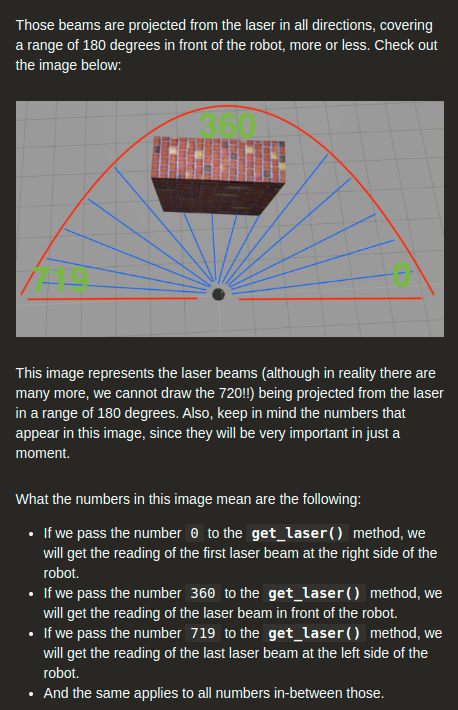
The solution for Exercise 2.2 is indeed correct. If you check the explanation of how the lidar is set up for this robot, you’ll see that it covers 180 degrees in front of the robot, with a resolution of 720 points.
So, it makes sense that the only value you receive is for laser2 = robotcontrol.get_laser(360), because that corresponds to the front of the robot. If you check the simulation, you’ll see that the only object is the wall directly in front of the robot.
The other two values, 0 and 720 correspond to the left and right side of the robot, and since there is no object in those directions, you get an inf value. This is consistent with what you would get from any lidar (simulated or real) that exceeds the maximum range of the sensor, since the laser is not bouncing back at that location.
Thanks for the clarification.
This topic was automatically closed 10 days after the last reply. New replies are no longer allowed.