In Motion planning using graphical interfaces part 2 (in ROS Manipulation 5 days - Unit 4)
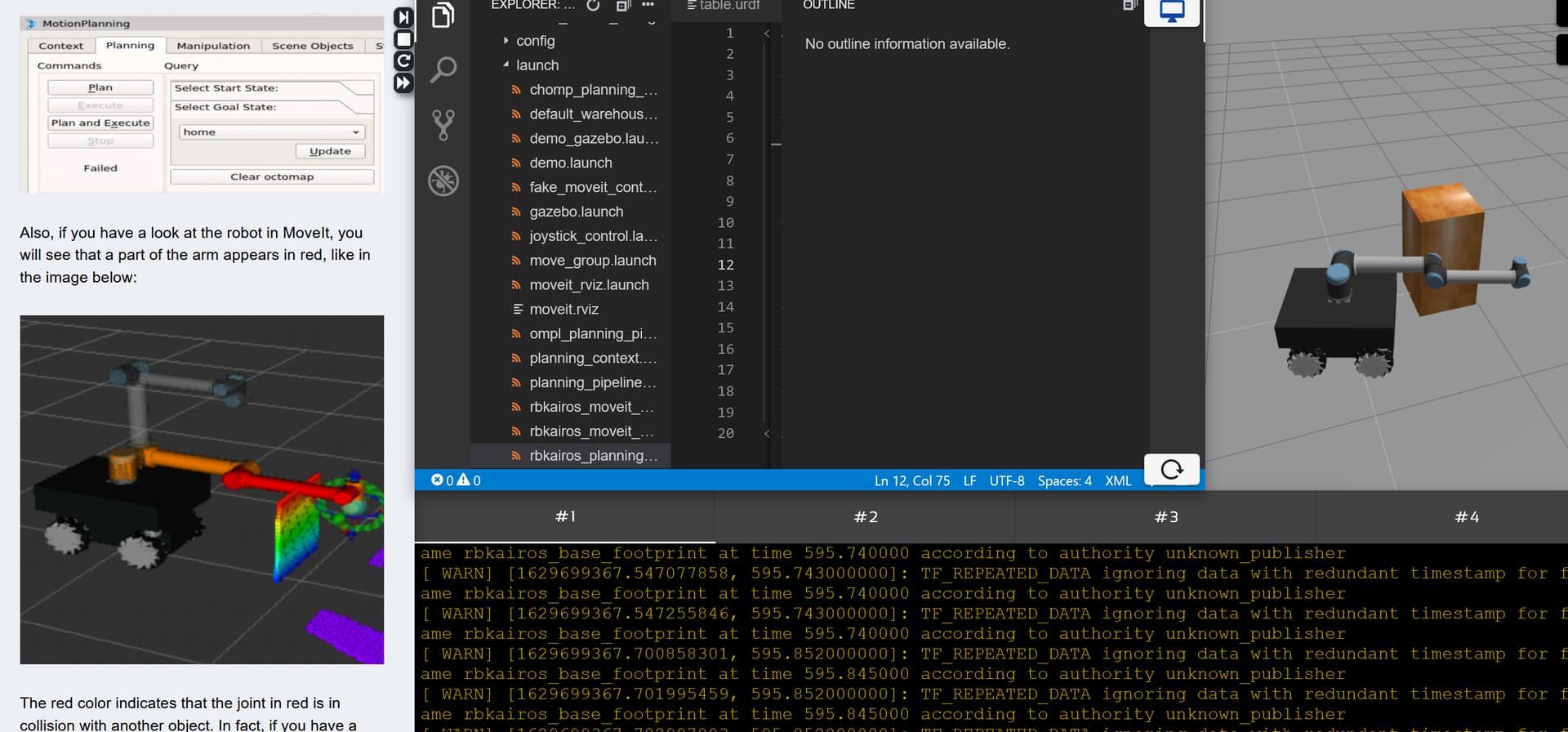
Was just following the instructions and when I put the table object in Gazebo and planning a home position (from the start position), The robot arm just crashes to the table without stopping…, which was supposed to avoid that from its pointcloud feed in from the camera into MoveIt planner, it should avoid crashing the arm to the table, please advice on this issue I’m having?
Are you seeing the octomap points in your MoveIt screen (like it’s shown in the notebook image)? If you are not, you should try to spawn the object with a little bit more separation to the robot. You can tune this in the x parameter of the command:
also, I’m near to completion on ROS Manipulation in 5 days , do you reckon I need to complete ROS for Industrial Robots 101? this course seems quite similar to the 5 days Manipulation one?
also, I see notification popping up asking me to migrate to Noetic…, Im confused in what to do? I thought these environment for the courses are updated by you or theconstruct itself? shouldnt that be…, please advice
also, how can I save the notebooks inside each unit/chapters ? Coz I have to look back and forth looking for answers and commands and concepts to complete projects…, it is very time consuming
No, you don’t need to do the ROS Industrial course since the contents are already covered in the ROS Manipulation course.
Yes, the migration is done by us. You are already working on ROS Noetic for this course so don’t worry about that message.
It’s not possible to save the notebooks of the courses since they could be used for the wrong purposes. You can though review any notebook at any point by clicking on this blue book icon in the top-left corner of the notebook:
Any updates please? I’m still waiting …to progress on…,
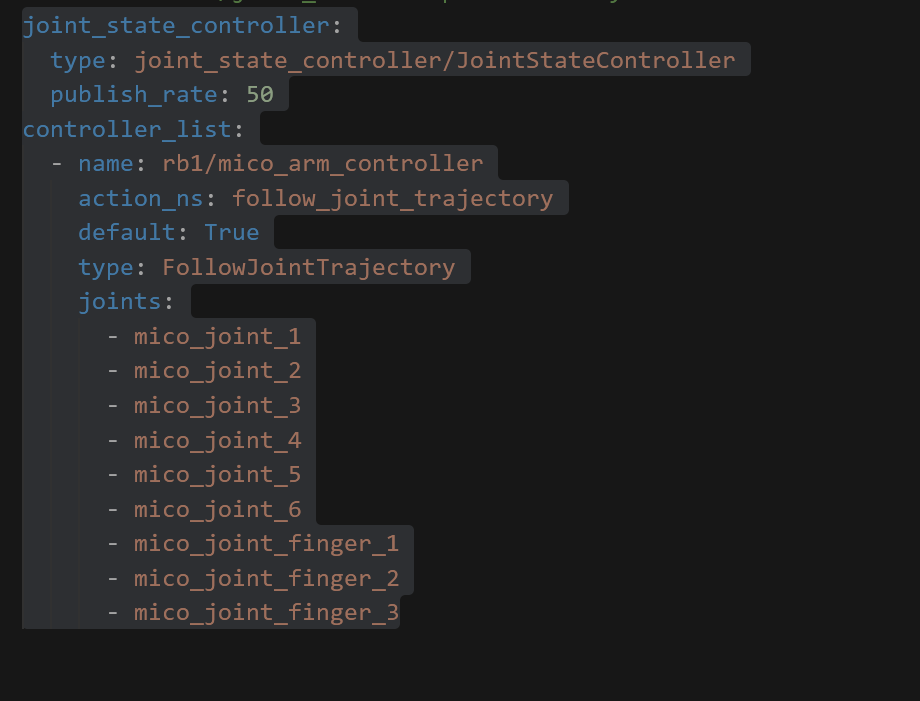
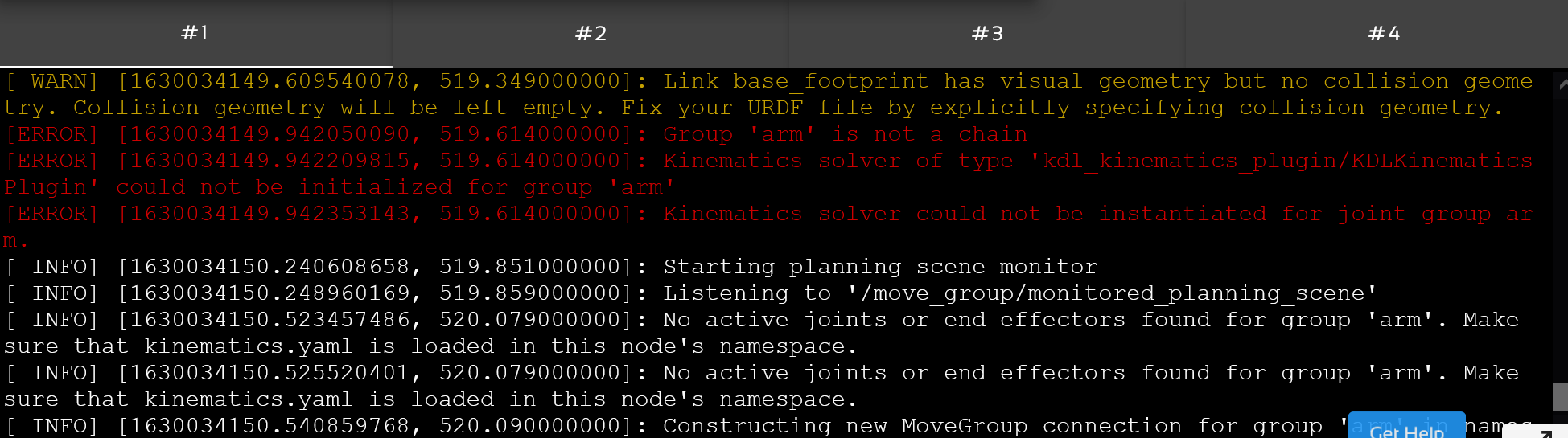
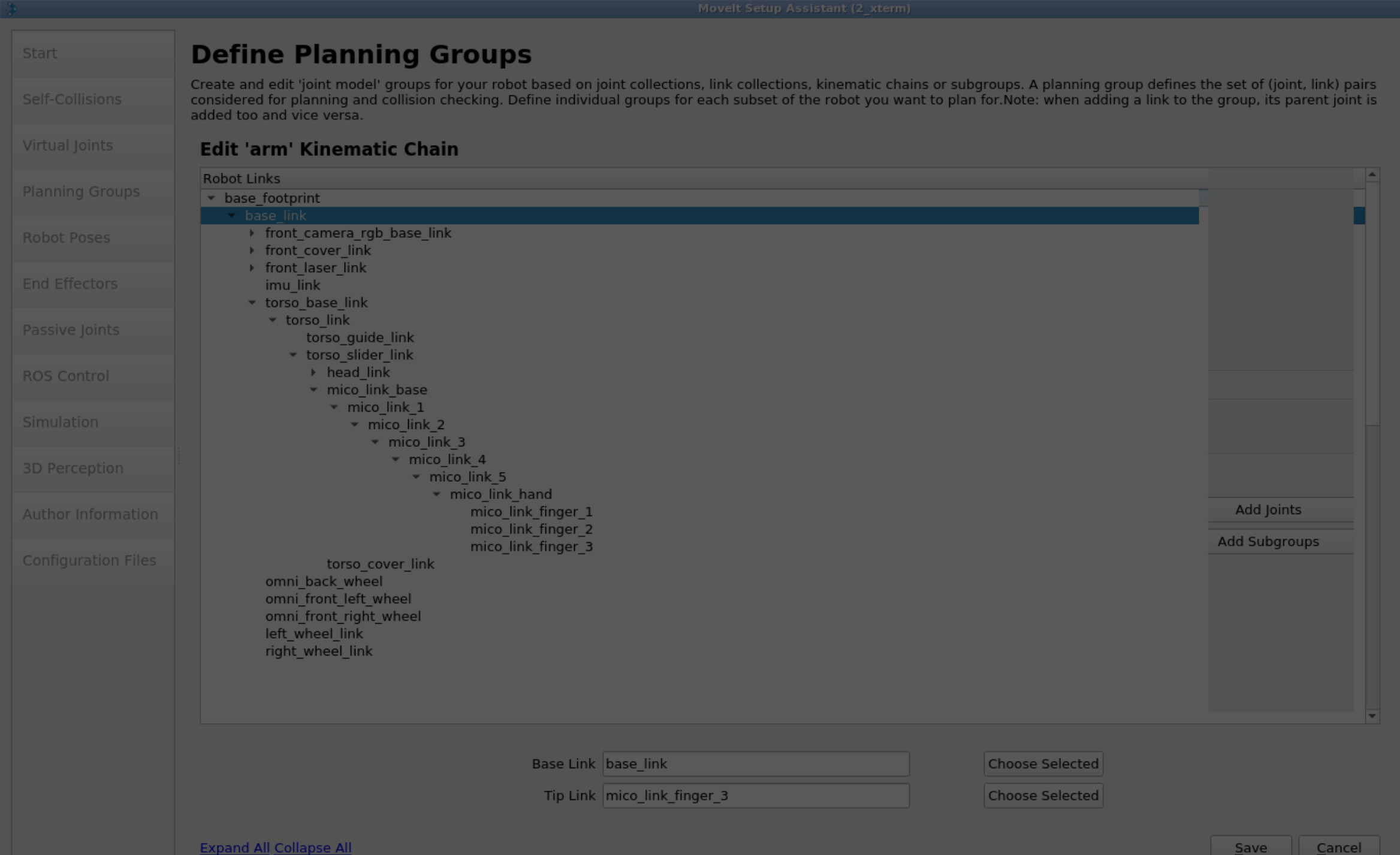
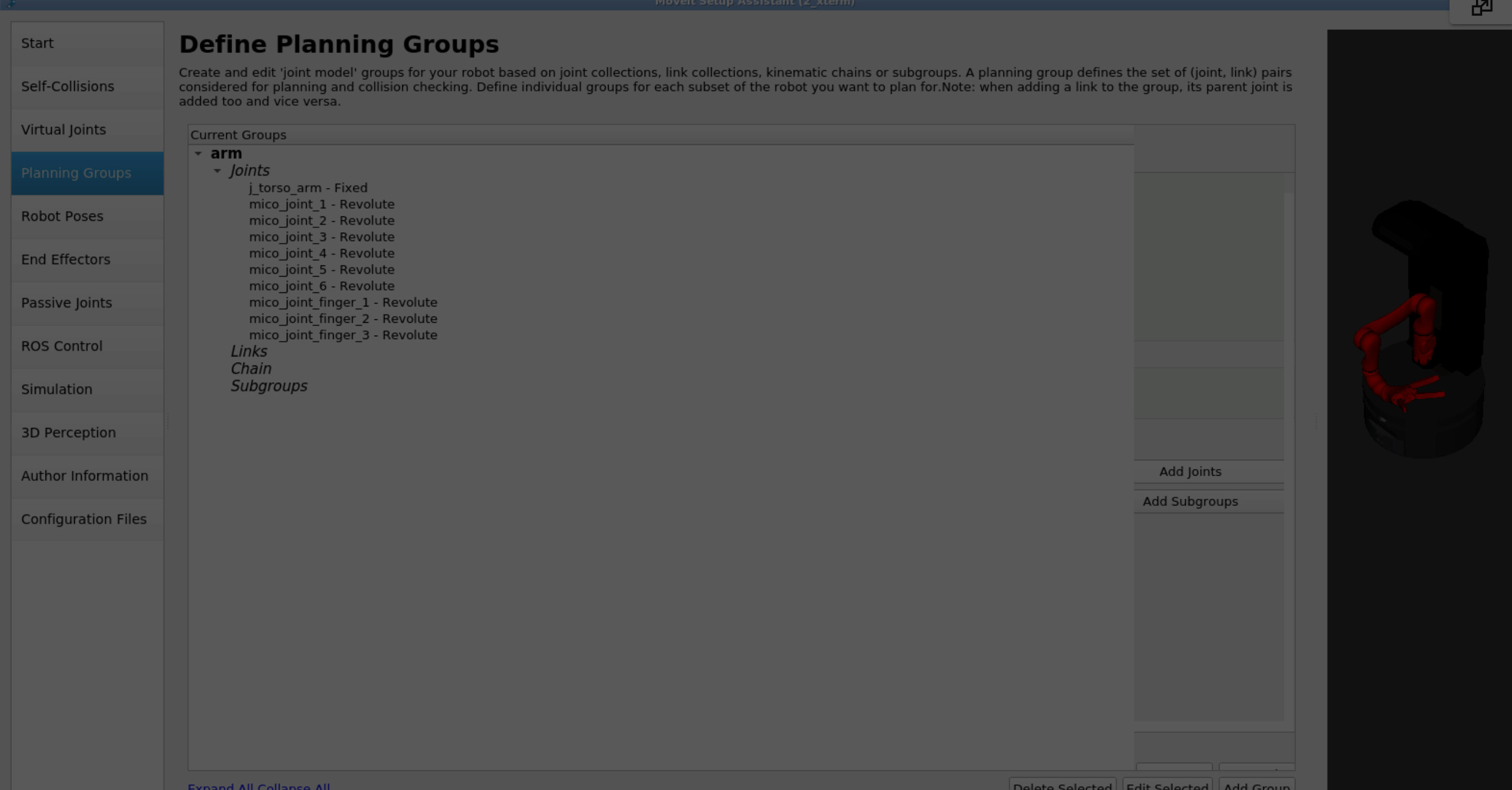
I have tried adding joints of the arm by “add joints” in planning group section and also tried add_kinchain (base link and tip link)
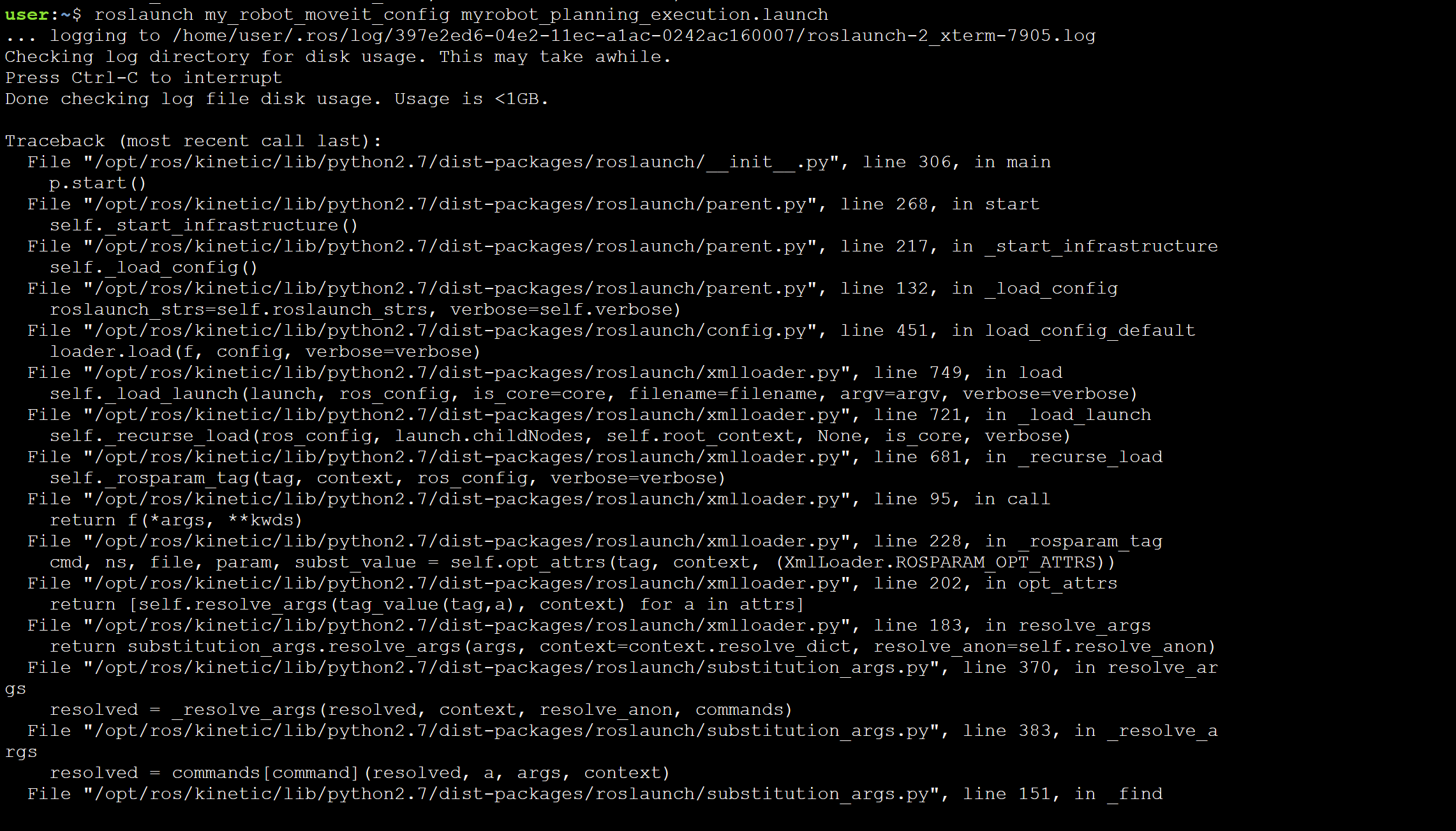
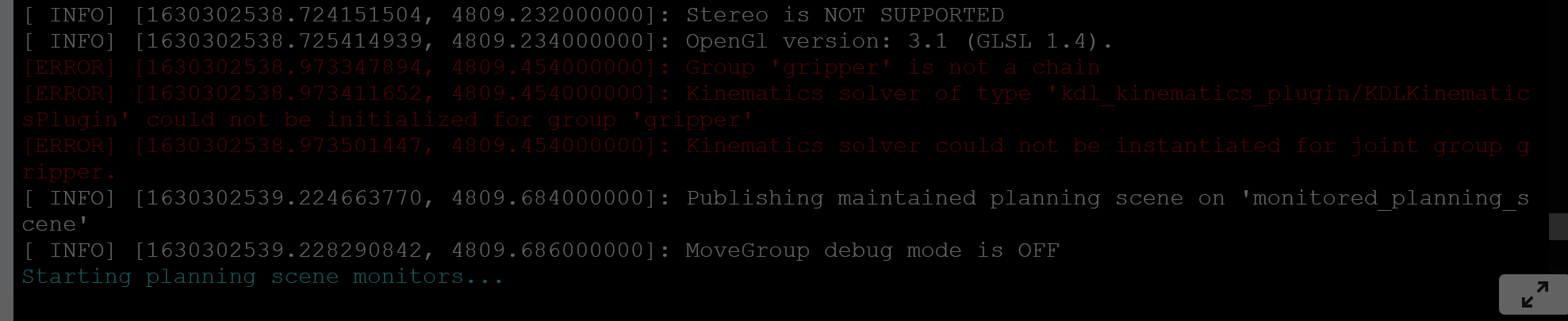
I still get these errors…(IT seems like what I learnt in previous chapters , I applied to the project…ERRORS comes up…various of them above and below )
We are working on modifying some things in this project in order to make it more accessible to students. I suggest you move on to other courses in the meantime. I’ll let you know once we have updated it.
@albertoezquerro , ok I see, yea it would be great if the gripper works as well,
Now that I have gone through this course of Robot Manipulation, I would want to apply it to my robot which is based on arduino connecting to several servo motors, do you have any suggestions and advice on where to find an arduino sketch generator on ROS for my robot? thks