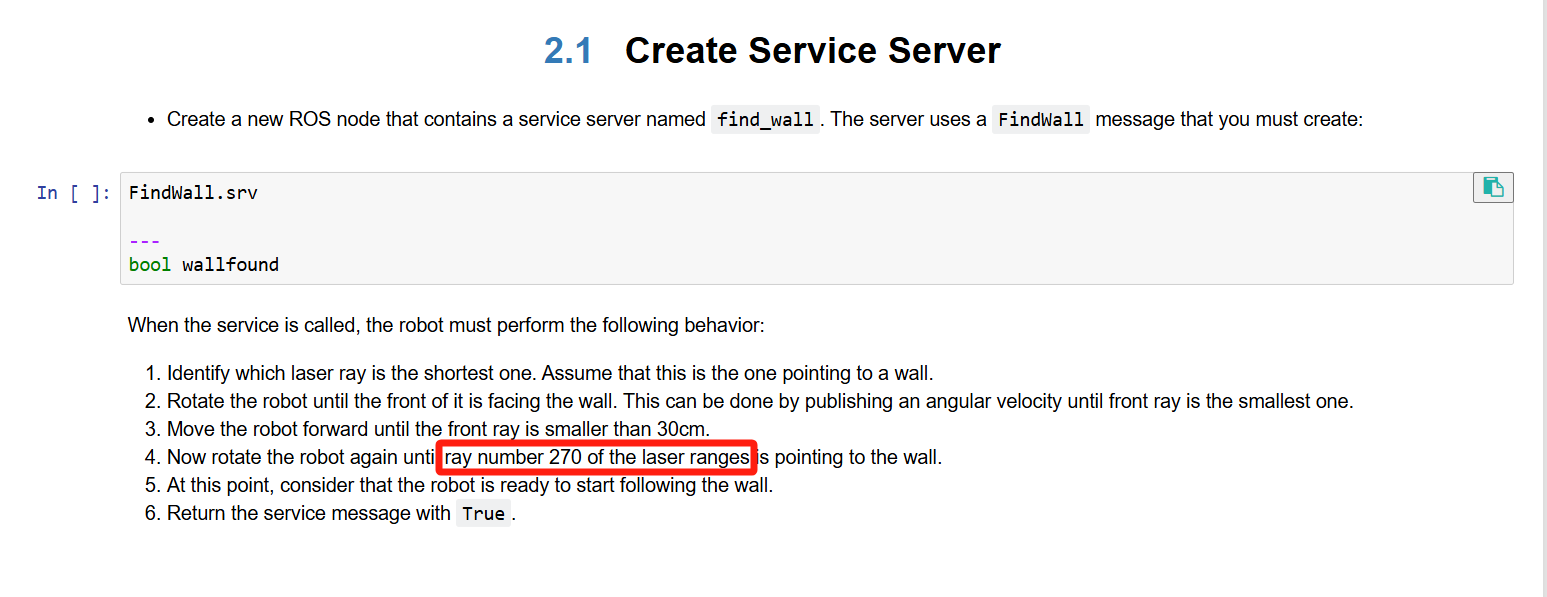
“Now rotate the robot again until ray number 270 of the laser ranges is pointing to the wall.”
However, based on the actual laser scan setup and index distribution, it should be ray number 180 (not 270) that points perpendicular to the wall, allowing the robot to walk parallel to the wall for proper wall following.
Yes, you are right with your calculation.
The real robot TurtleBot has 720 laser scan ranges, so to make the robot have the wall on its right side, then the robot must be rotated in such a way that ray 180 now faces the wall.
Earlier, the real robot TurtleBot had 1080 laser scan ranges, so the right ray would be 270. But I believe that the laser model was replaced on the robot (because it became faulty). So now the laser scanner produces 720 ranges instead of 1080 ranges. So you are correct, it should be 180 and not 270.
Please go past the confusion. Someone will fix the instructions very soon.
I want to ask another question. I create my Rosject following the instruction by clicking the link. It is encouraged to share my Rosject in the notebook, however the Rosject is not sharable. Am I missing something?
@yuming6924, when a private rosject is shared with you, you cannot share it with others. This protects the “sharing rights” of a private rosject’s author.