The Wall Following part of my program doesnt seem to initiate. I cant seem to understand why the further part of my main block isnt being reached even after destroy node. I have added wall_following code below
import rclpy
from rclpy.node import Node
from new_interface.srv import FindWall
from geometry_msgs.msg import Twist
from sensor_msgs.msg import LaserScan
from rclpy.qos import ReliabilityPolicy, QoSProfile
from rclpy.executors import MultiThreadedExecutor, SingleThreadedExecutor
from rclpy.callback_groups import ReentrantCallbackGroup, MutuallyExclusiveCallbackGroup
import time
class ClientSync(Node):
def __init__(self):
super().__init__('find_wall_client')
self.client = self.create_client(FindWall,'find_wall')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('service not available')
self.req = FindWall.Request()
def send_request(self):
self.future = self.client.call_async(self.req)
class WallFollow(Node):
def __init__(self):
super().__init__('follow_wall')
self.group1= MutuallyExclusiveCallbackGroup()
self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)
self.subscriber= self.create_subscription(LaserScan, '/scan', self.laser_callback, QoSProfile(depth=10, reliability=ReliabilityPolicy.RELIABLE), callback_group=self.group1)
self.timer_period= 0.5
self.laser_right= 0
self.cmd = Twist()
def laser_callback(self, msg):
self.laser_right = msg.ranges[270]
self.laser_front = msg.ranges[359]
def motion(self):
self.get_logger().info('I receive: "%s"'%str(self.laser_right))
self.get_logger().info('I front "%s"'%str(self.laser_front))
if self.laser_front < 0.4:
self.cmd.linear.x=0.05
self.cmd.angular.z= -0.8
self.get_logger().info('Making Turn')
else:
if self.laser_right > 0.3 :
self.cmd.linear.x=0.03
self.cmd.angular.z= 0.09
self.get_logger().info('Moving Towards Wall')
elif self.laser_right < 0.2:
self.cmd.linear.x=0.03
self.cmd.angular.z= -0.09
self.get_logger().info('Moving Away Wall')
else:
self.cmd.linear.x=0.03
self.cmd.angular.z = 0.00
self.get_logger().info('Straight')
self.publisher_.publish(self.cmd)
def main(args=None):
rclpy.init(args=args)
client = ClientSync()
client.send_request()
while rclpy.ok():
rclpy.spin_once(client)
if client.future.done():
try:
response=client.future.result()
except Exception as e:
client.get_logger().info('Service call failed %r' %(e,))
else:
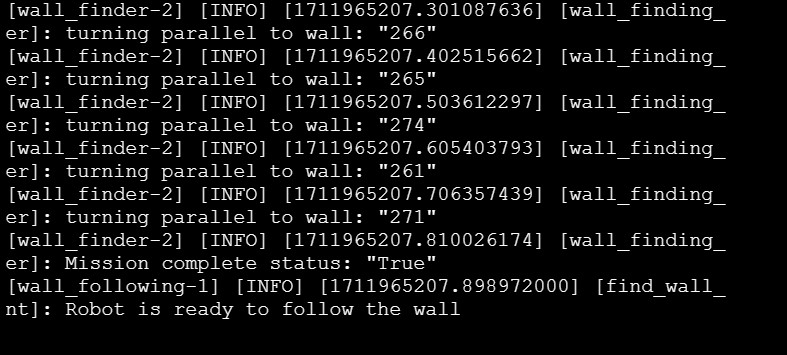
client.get_logger().info("Robot is ready to follow the wall")
break
client.destroy_node()
executor = MultiThreadedExecutor(num_threads=4)
wall_follow= WallFollow()
executor.add_node(wall_follow)
try:
executor.spin()
finally:
executor.shutdown()
wall_follow.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
This is the wall finder program
from geometry_msgs.msg import Twist
from new_interface.srv import FindWall
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
from rclpy.qos import ReliabilityPolicy, QoSProfile
from rclpy.callback_groups import ReentrantCallbackGroup, MutuallyExclusiveCallbackGroup
from rclpy.executors import MultiThreadedExecutor
import time
import math
class WallFinder(Node):
def __init__(self):
super().__init__('wall_finding_server')
self.group1 = MutuallyExclusiveCallbackGroup()
self.group2 = MutuallyExclusiveCallbackGroup()
self.wall_find_srv = self.create_service(FindWall, 'find_wall', self.empty_callback, callback_group=self.group1)
self.mov_pub = self.create_publisher(Twist, 'cmd_vel', 10)
self.laser_sub= self.create_subscription(LaserScan, '/scan', self.laser_callback, QoSProfile(depth=10, reliability=ReliabilityPolicy.BEST_EFFORT), callback_group=self.group2)
self.timer_period= 0.5
self.laser_front= 0
self.laser_right= 0
self.min_range= 100
self.min_index= 0
self.turn_complete= False
i=0
self.cmd= Twist()
def laser_callback(self,msg):
self.laser_right = msg.ranges[270]
#270 for sim 180 for actual robot
self.laser_front = msg.ranges[359]
ranges= msg.ranges
self.min_range = min(ranges)
self.min_index = ranges.index(self.min_range)
def turn_to_wall(self):
while self.turn_complete==False:
self.get_logger().info('Turning towards wall "%s"' % str(self.min_index))
if 1 <= self.min_index <=180:
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.3
self.get_logger().info('Turning')
elif 180 < self.min_index < 357:
self.cmd.linear.x = 0.0
self.cmd.angular.z = -0.3
self.get_logger().info('Turning')
elif 357 < self.min_index < 362:
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
self.turn_complete = True
self.get_logger().info('Stop')
break
self.mov_pub.publish(self.cmd)
time.sleep(0.1)
def parallel_wall(self):
for i in range(150):
self.get_logger().info('turning parallel to wall: "%s"' % str(self.min_index))
if 0 < self.min_index < 90 or 272 < self.min_index < 359:
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.3
if 90 < self.min_index < 268:
self.cmd.linear.x = 0.0
self.cmd.angular.z = -0.3
elif 268 < self.min_index < 272:
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
break
self.mov_pub.publish(self.cmd)
time.sleep(0.1)
def stop(self):
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
self.mov_pub.publish(self.cmd)
time.sleep(0.1)
def approach_wall(self):
for i in range(150):
self.get_logger().info('Distance between robot and wall: "%s"' %str(self.laser_front))
if self.laser_front > 0.28 :
self.cmd.linear.x = 0.03
self.cmd.angular.z = 0.0
elif 90 < self.laser_front <= 0.27:
self.cmd.linear.x = -0.01
self.cmd.angular.z = 0.0
else:
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
break
self.mov_pub.publish(self.cmd)
time.sleep(0.1)
def empty_callback(self, request, response):
self.get_logger().info('Front distance: "%s"' % str(self.laser_front))
self.get_logger().info('Min range"%s"' % str(self.min_range))
self.get_logger().info('Min_index "%s"' % str(self.min_index))
self.get_logger().info('Robot is now moving')
self.turn_to_wall()
self.approach_wall()
self.parallel_wall()
self.stop()
response.wallfound= True
self.get_logger().info('Mission complete status: "%s"' %str(response.wallfound))
return response
def main(args=None):
rclpy.init(args=args)
wall_finder_node = WallFinder()
executor = MultiThreadedExecutor(num_threads=4)
executor.add_node(wall_finder_node)
try:
executor.spin()
finally:
executor.shutdown()
wall_finder_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
This is where the output gets stuck