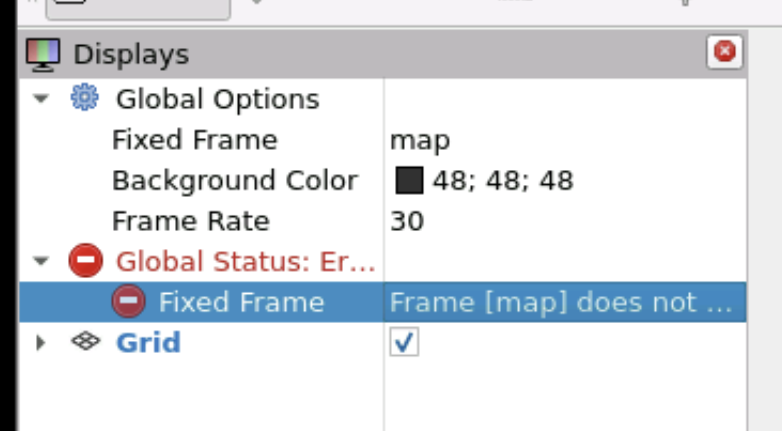
The course says- " 5. Go to the RVIZ2 left panel, under Global Options, click on the drop down for the Fixed Frame (fixed frame) and select base_link . Also, ensure that the TF element checkbox is checked. After a few seconds of loading, you should see all of the robot’s reference frame X, Y, Z axes represented in the central area with the grid."
But it says frame [map] does not exist and I am unable to select base_link. Not visible in the screenshot but I even added the TF element and followed all the instructions given by the tutorial.