Hi all!
I have a question regarding the local planner in the real robot lab of the Navigation in 5 days course.
I am working on point 3 where I am asked to implement the move_base launch file and the path planning for the turtlebot.
The global planner seems to be working fine, since in Rviz I can visualize the path calculated. But the local planner returns the following error in the console after sending a goal using the Nav 2d send goal tool of rviz:
[ INFO] [1640830338.578965931, 5020.293000000]: Got new plan
[ WARN] [1640830338.580603832, 5020.293000000]: DWA planner failed to produce path.
[ INFO] [1640830338.956512283, 5020.494000000]: Got new plan
[ WARN] [1640830338.958230667, 5020.496000000]: DWA planner failed to produce path.
[ INFO] [1640830339.351365122, 5020.694000000]: Got new plan
[ WARN] [1640830339.353098334, 5020.694000000]: DWA planner failed to produce path.
After a while, the systems starts the recovery actions but the next message prompts in the console:
[ WARN] [1640830268.861502417, 4981.508000000]: Rotate recovery behavior started.
[ERROR] [1640830268.861638724, 4981.508000000]: Rotate recovery can’t rotate in place because there is a potential collision. Cost: -1.00
[ INFO] [1640830269.550177849, 4981.925000000]: Got new plan
[ WARN] [1640830269.552023979, 4981.925000000]: DWA planner failed to produce path.
[ WARN] [1640830269.860818599, 4982.108000000]: Clearing both costmaps to unstuck robot (1.84m).
However, I can’t make it work.
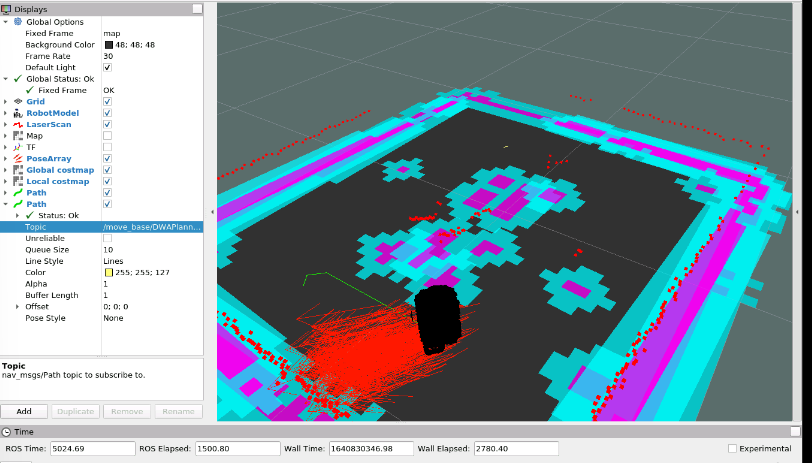
I attach the rviz environment and the launch file with the move_base_launcher.launch file:
<launch>
<!--- Run AMCL -->
<include file="$(find my_turtlebot_localization)/launch/my_turtlebot_localization.launch" />
<!-- Run move_base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find my_turtlebot_path_planning)/config/move_base_params.yaml" command="load" />
<rosparam file="$(find my_turtlebot_path_planning)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find my_turtlebot_path_planning)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find my_turtlebot_path_planning)/config/local_costmap_params.yaml" command="load" />
<param name="local_costmap/width" value="4.0"/>
<param name="local_costmap/height" value="4.0"/>
<rosparam file="$(find my_turtlebot_path_planning)/config/global_costmap_params_map.yaml" command="load" />
</node>
</launch>
I will appreciate your help.
Thank you!!