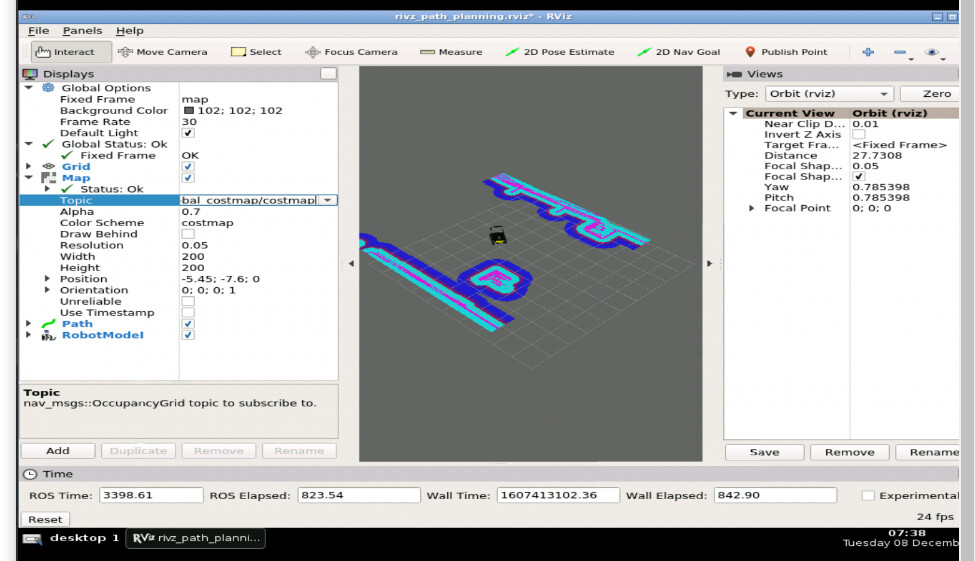
Prof, my Color Scheme option in RViz for both global and local maps are shown same. The grid cells covered by costmaps are same. The new object introduced is detected by both of them.
How can I solve these issues ?
Global costmap:
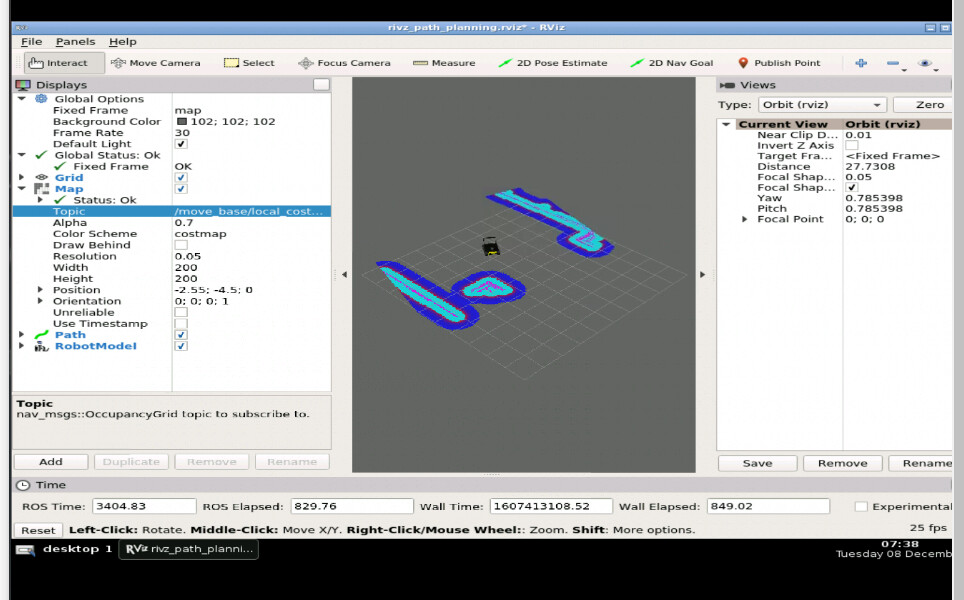
Local costmap:
There’s very small difference. The global map isn’t covering the whole area
Hello @abdulbasitisdost,
Review the configuration files of the global and local costmaps. Probably, in the configuration file of your global costmap you don’t have the proper parameters set. They should look something like this:
global_costmap:
global_frame: /map
robot_base_frame: /base_link
static_map: true
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
(I just created these parameters so in your case you might have some differences).
Pay special attention to the static_map parameter, which indicates to generate the costmap from the static map you created previously. All this is explained in the notebook.
Best,