hi the construct team,
I am facing a problem in the Nav 2 in 5 days course the problem is when launching the project_localization package the localization launch file it dose not appear the map in the rviz2 before it was appearing it and everything works well but since 2 days i did not change anything just when i try the map do not appear in the rviz2.
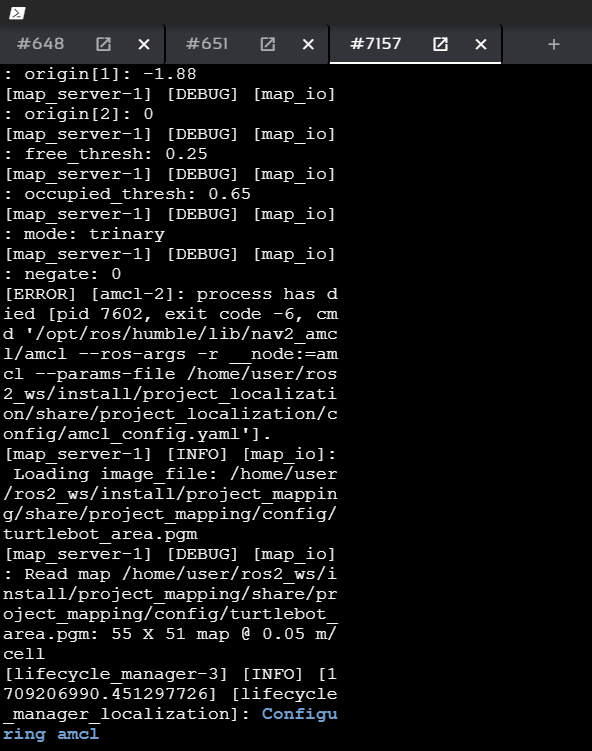
this is a picture of the output when running the launch file :
This is the localization launch file :
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
nav2_yaml = os.path.join(get_package_share_directory('project_localization'), 'config', 'amcl_config.yaml')
map_file = os.path.join(get_package_share_directory('project_mapping'), 'config', 'turtlebot_area.yaml')
return LaunchDescription([
Node(
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[{'use_sim_time': True},
{'yaml_filename':map_file}]
),
Node(
package='nav2_amcl',
executable='amcl',
name='amcl',
output='screen',
parameters=[nav2_yaml]
),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_localization',
output='screen',
parameters=[{'use_sim_time': True},
{'autostart': True},
{'node_names': ['map_server', 'amcl']}]
)
])
this is the output of the Rviz2 :
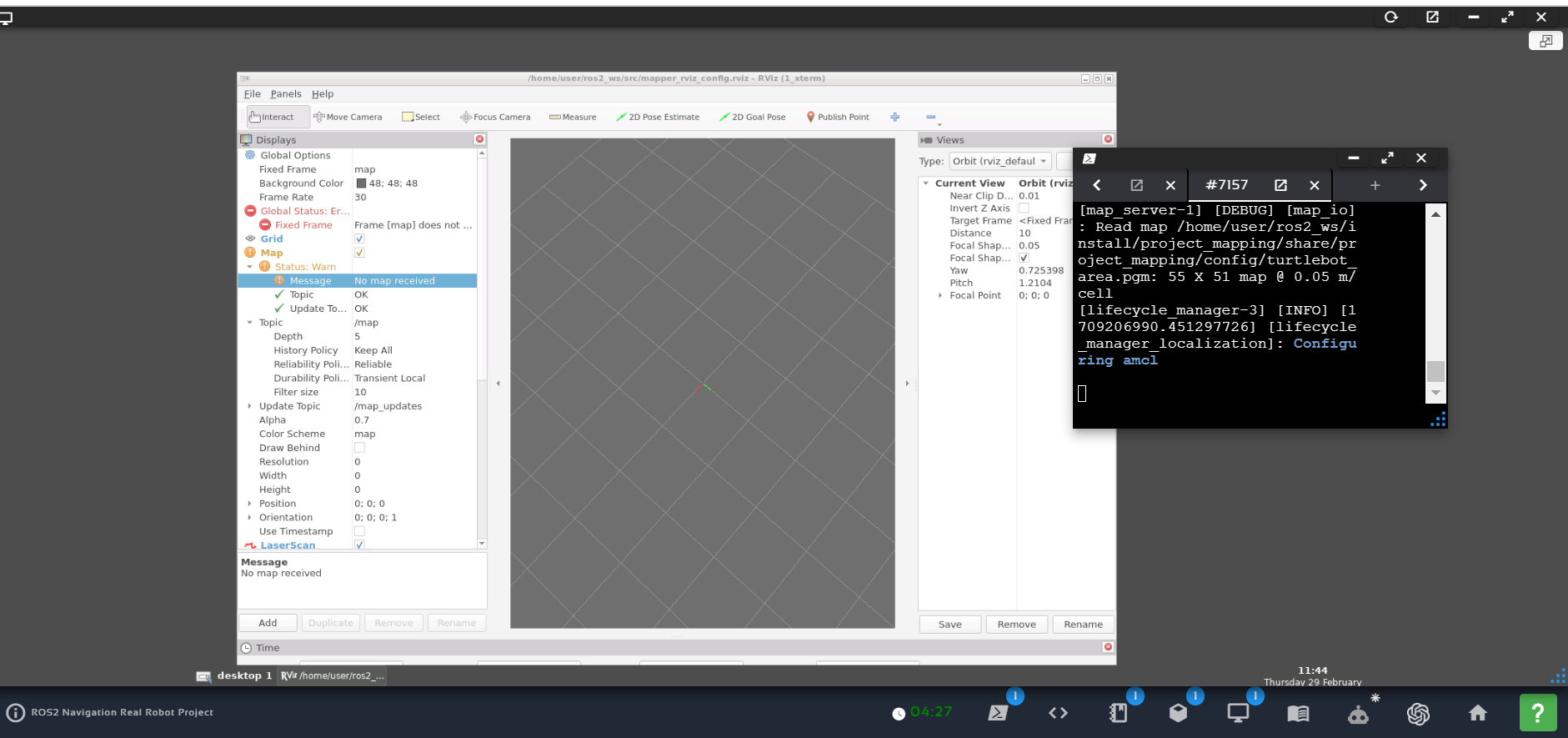
I hope anyone can help for more details i am free to answer.
Best Regards,
Ghassan