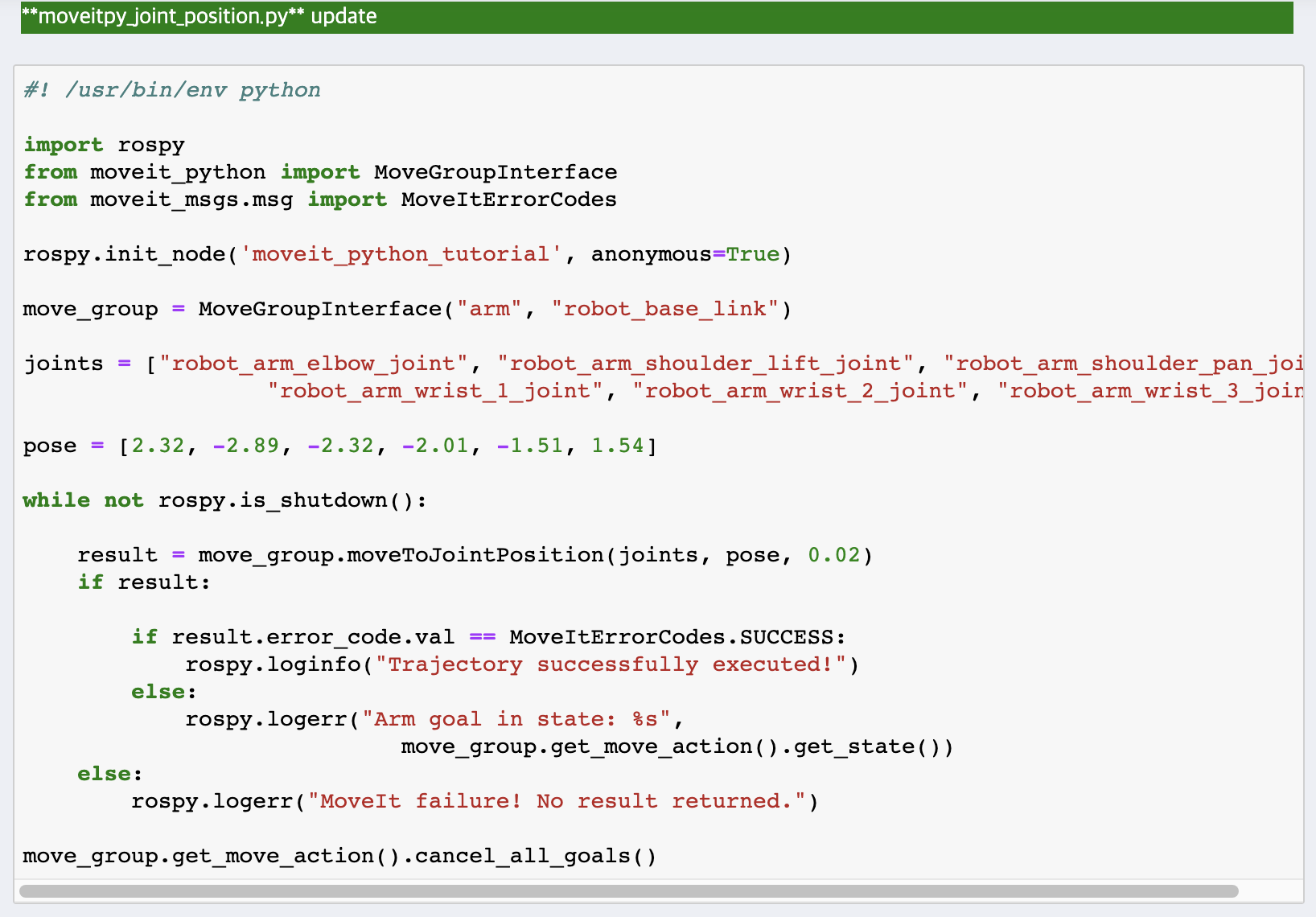
In case I change the object(grasp_box.urdf) location,
then the pose value of the arm should be changed too.
How I figure out the new pose value?
Hello @hki,
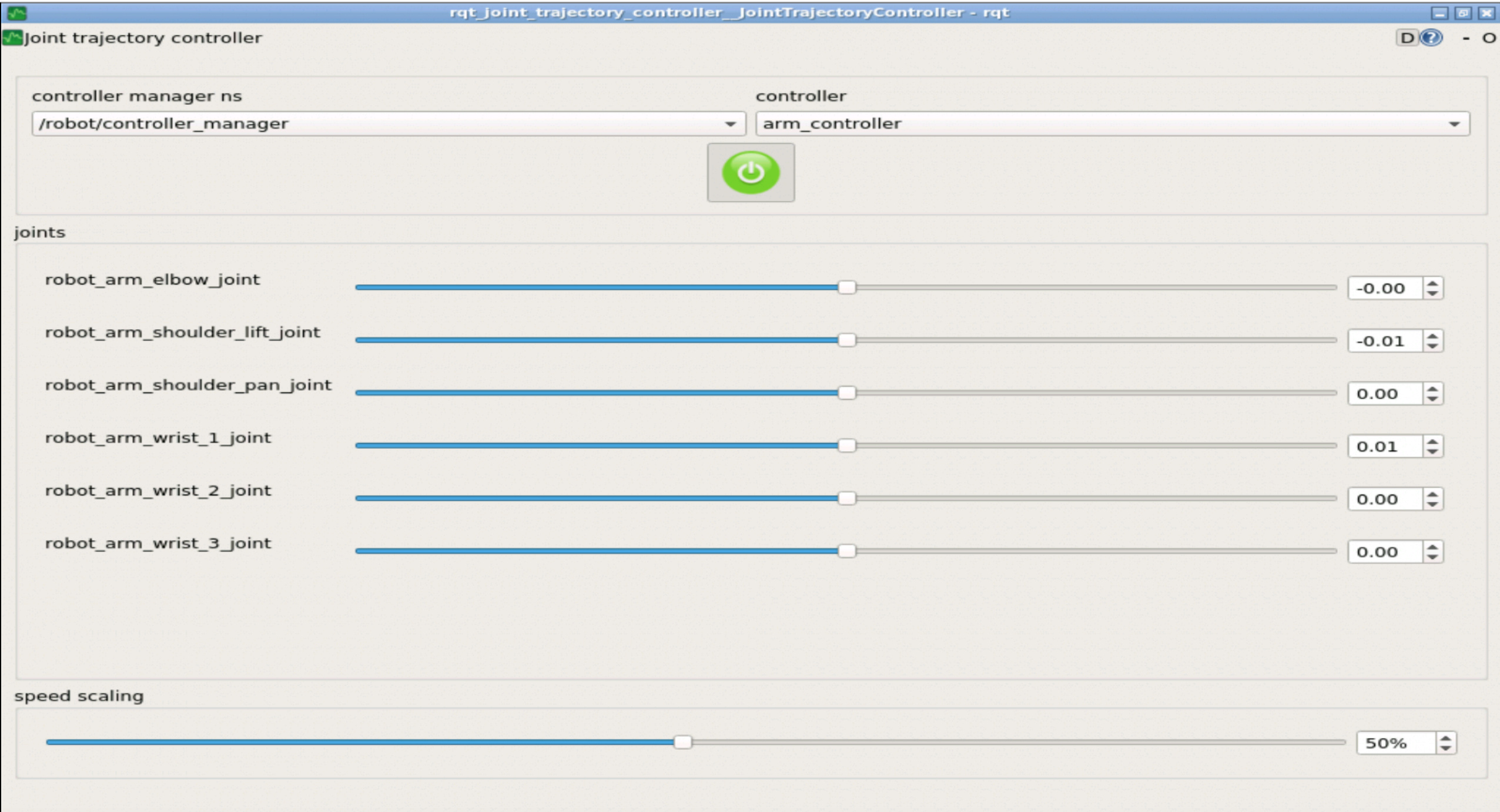
I suggest you use the rqt_joint_trajectory_controller tool. You can launch it with the following command:
ROS_NAMESPACE=robot rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller
Then, you will be able to connect to the trajectory action of your arm and move the joints as you want, with the following GUI:
Best,
Thank you for help! I will follow the instruction 