I am at the Unit4. Setting Up Grasping / Ex.6.1.2 : Call the action server to ACTIVATE the graspable object detection]
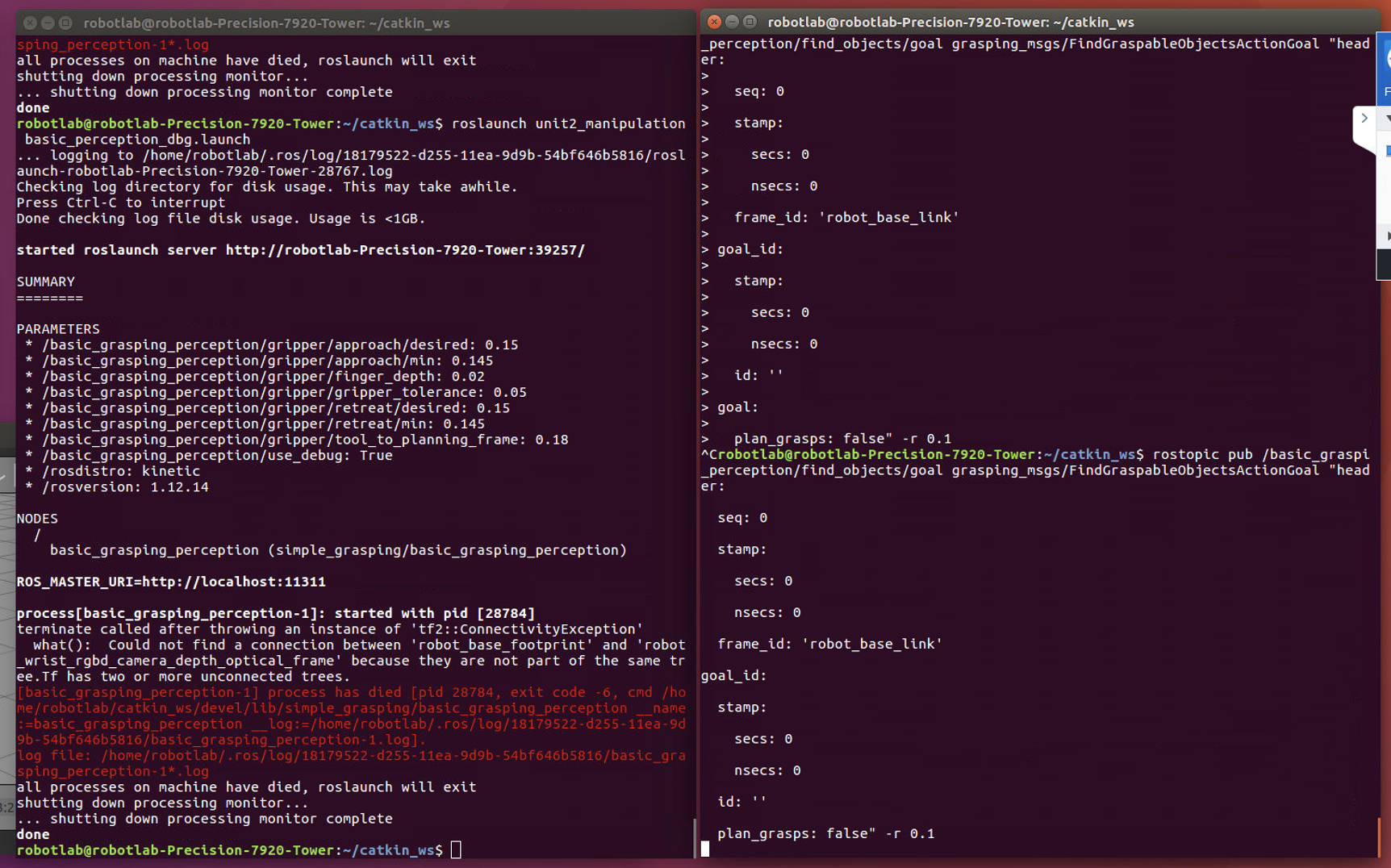
When I call the Action Server, the process died.
I tried to figure out, but have no idea 
I am at the Unit4. Setting Up Grasping / Ex.6.1.2 : Call the action server to ACTIVATE the graspable object detection]
When I call the Action Server, the process died.
I tried to figure out, but have no idea
Hello @hki,
That looks like in error in the TF tree of your simulation (robot_base_footprint and robot_wrist_rgbd_camera_depth_optical_frame are not connected). So probably you have set up something wrong on your Gazebo simulation locally.
Thank you for answer @albertoezquerro
Yes!! The problem is exactly what you have said.
But I have nothing done with gazebo… Would let me know how is the setting ROS Academy with Gazebo? Actually, I am even do not know how to setting the gazebo. ㅠㅠ
Hello @hki,
The setup we have in the Academy for this course is an Ubuntu 16.04 machine with ROS Kinetic and Gazebo 7. The repository with the Gazebo simulation packages you can find it here: https://bitbucket.org/theconstructcore/rb_kairos_sim_new/src/master/
However, keep in mind that you might need to install some extra packages which are dependencies needed by this simulation or by the packages used in the course.
Best,