We need more details so we can help.
- What did you do exactly?
- How is the robot expected to turn?
- How is it turning?
- Any screencast or screenshot demonstrating the problem?
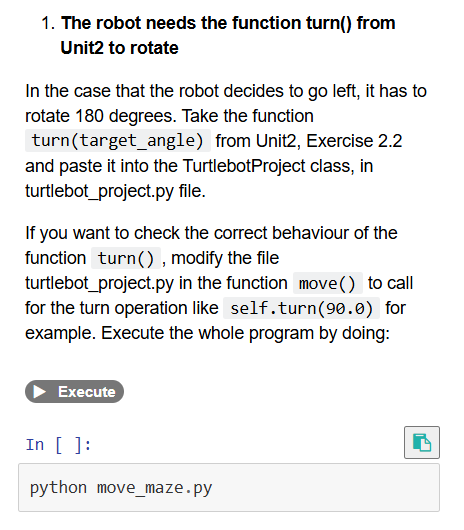
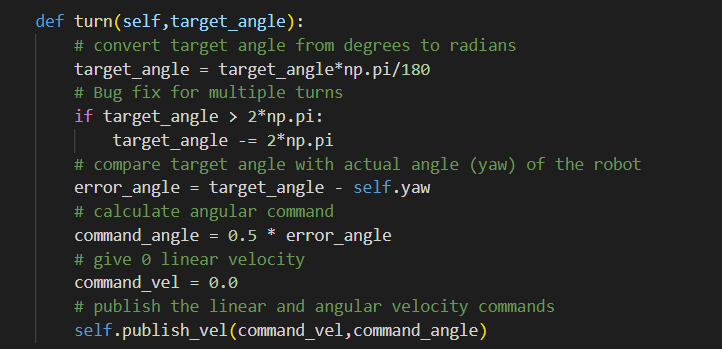
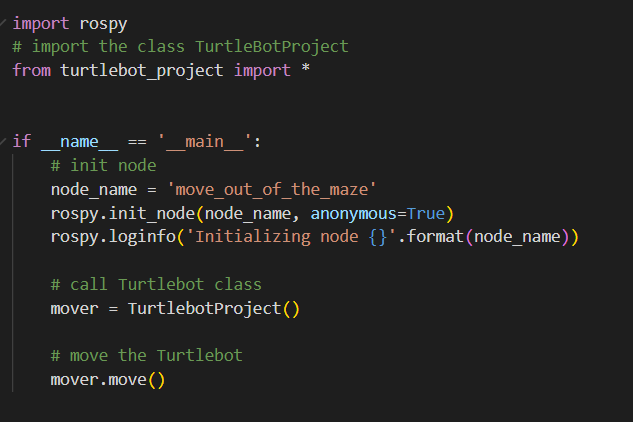
Right, so they are two files move_maze.py and turtlebot_project.py, this turtlebot files has a class which is then imported into move_maze.py and a method of that class move() is been called, now we just need to add a method turn into the class which is predefined in previous units and just call this method into another predefined method move which is eventually been called…
These are the code sources… @bayodesegun
Thanks for the screenshots. Please also address these points…
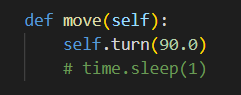
I mean since the move method is called in maze_project.py file, it should turn be 90 degree because in the method declaration we called self.turn(90.0)…
Okay, did it turn at all or just didn’t turn 90 deg? Please note that the 90° might not be 100% accurate. We would need precise math to achieve that…
Yes Sir, I know that but it didn’t turn at all…
It took so long to get this out ![]() . Didn’t turn as expected is not necessarily didn’t turn at all
. Didn’t turn as expected is not necessarily didn’t turn at all ![]()
We’ll need some time to review this and come back to you.
1 Like