Hii ,
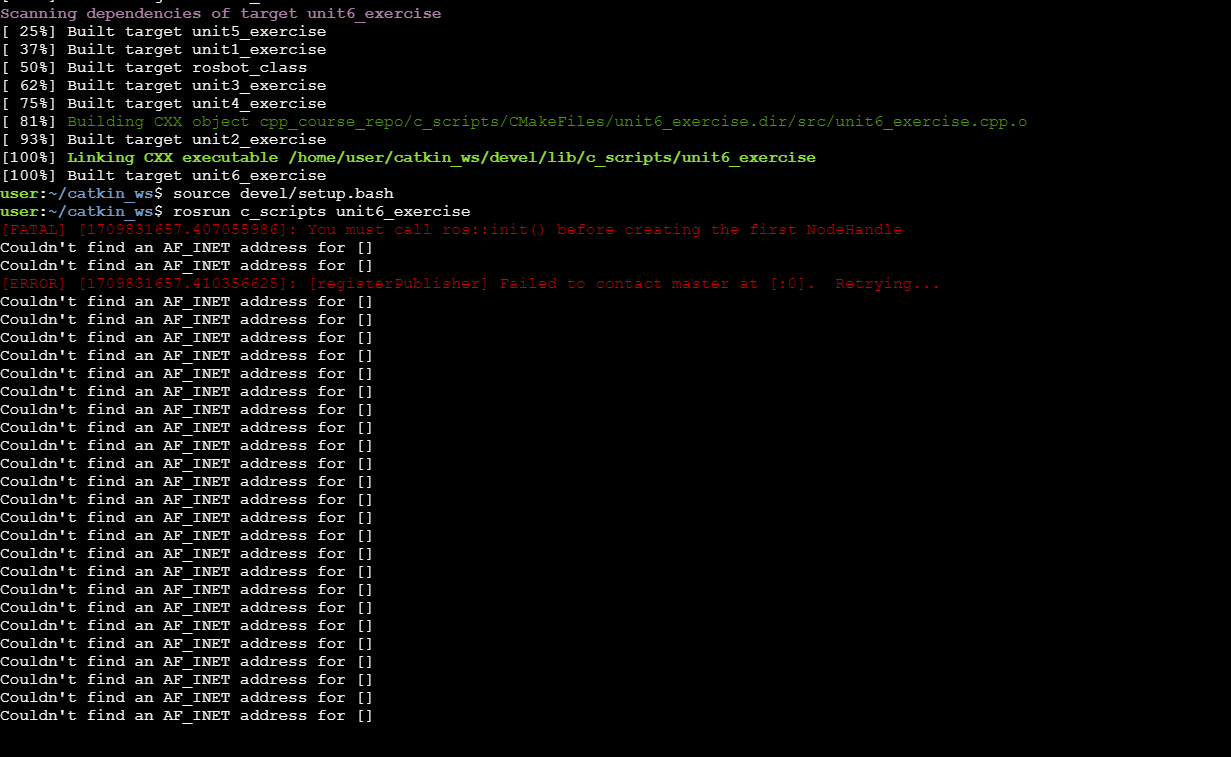
I write some code and I am able to compile it. But when I try to run I got the error in the following image. Can any on help me? I am here also attaching my solution(code) for the problem.
#include "rosbot_control/rosbot_class.h"
#include <ros/ros.h>
#include <string>
#include <iostream>
//#include <math>
using namespace std;
class Escape{
public:
Escape(string option){ //construct
Option = option;
}
string Option; //Attribute
public:
RosbotClass rosbot;
void RoboEsc();
};
void Escape::RoboEsc(){
//Robot is moving till wall is ver near
ROS_INFO_STREAM("Robot tries to escape");
while (rosbot.get_laser(0)<1.5){
rosbot.move_forward(1);
}
ROS_INFO_STREAM(" Robt is goin to take a right turn to avoid colllision");
//ask user for a time to turn
ROS_INFO_STREAM(" Give a number of seconds to turn, Time: ");
int time_1;
cin>>time_1;
rosbot.turn("clockwise",time_1);
//ask user for time to move forward
ROS_INFO_STREAM(" Give a number of seconds to move forward, Time: ");
int time_2;
cin>>time_2;
rosbot.move_forward(time_2);
//ask user to did the robot reach assumed position
ROS_INFO_STREAM("Did the robot at correct position: press Y/n");
string move_1,Y,n;
cin>>move_1;
if(move_1 ==Y){
rosbot.turn("counterclockwise",time_1);
rosbot.move_forward(5);
}
else if(move_1 == n){
ROS_INFO_STREAM(" Give a number of seconds to move forward, Time: ");
int time_3;
cin>>time_3;
rosbot.move_forward(time_3);
rosbot.turn("counterclockwise",time_1);
rosbot.move_forward(5);
}
else{
ROS_INFO_STREAM("yOU GIVEN A WRONG COMMAND PLEASE GIVE THE WRITE COMMAND");
if(move_1 ==Y){
rosbot.turn("counterclockwise",time_1);
rosbot.move_forward(5);
}
else if(move_1 == n){
ROS_INFO_STREAM(" Give a number of seconds to move forward, Time: ");
int time_3;
cin>>time_3;
rosbot.move_forward(time_3);
rosbot.turn("counterclockwise",time_1);
rosbot.move_forward(5);
}
}
rosbot.turn("clockwise",time_1);
}
int main(){
Escape("Escape");
return 0;
}