Hi experts @staff
I am trying to goo deep the Jibo project…so want to add wheels for it, and I did…however I could not load correctly the mobile_base_controller.
I have watched the class https://www.youtube.com/watch?v=9OWxX7PA4SU from the “Construct” trying to reply the answer: https://answers.ros.org/question/289561/help-to-run-diff_drive_controller/ in ROS Answers. However I still could not set to my case this control, and in this way the robot does not walk accurately (sometimes very unordened)…
Could you please assist me on this?
In order to make clear I am sending images from my launch file, my configure files .yaml, and the plugin part set on my urdf:
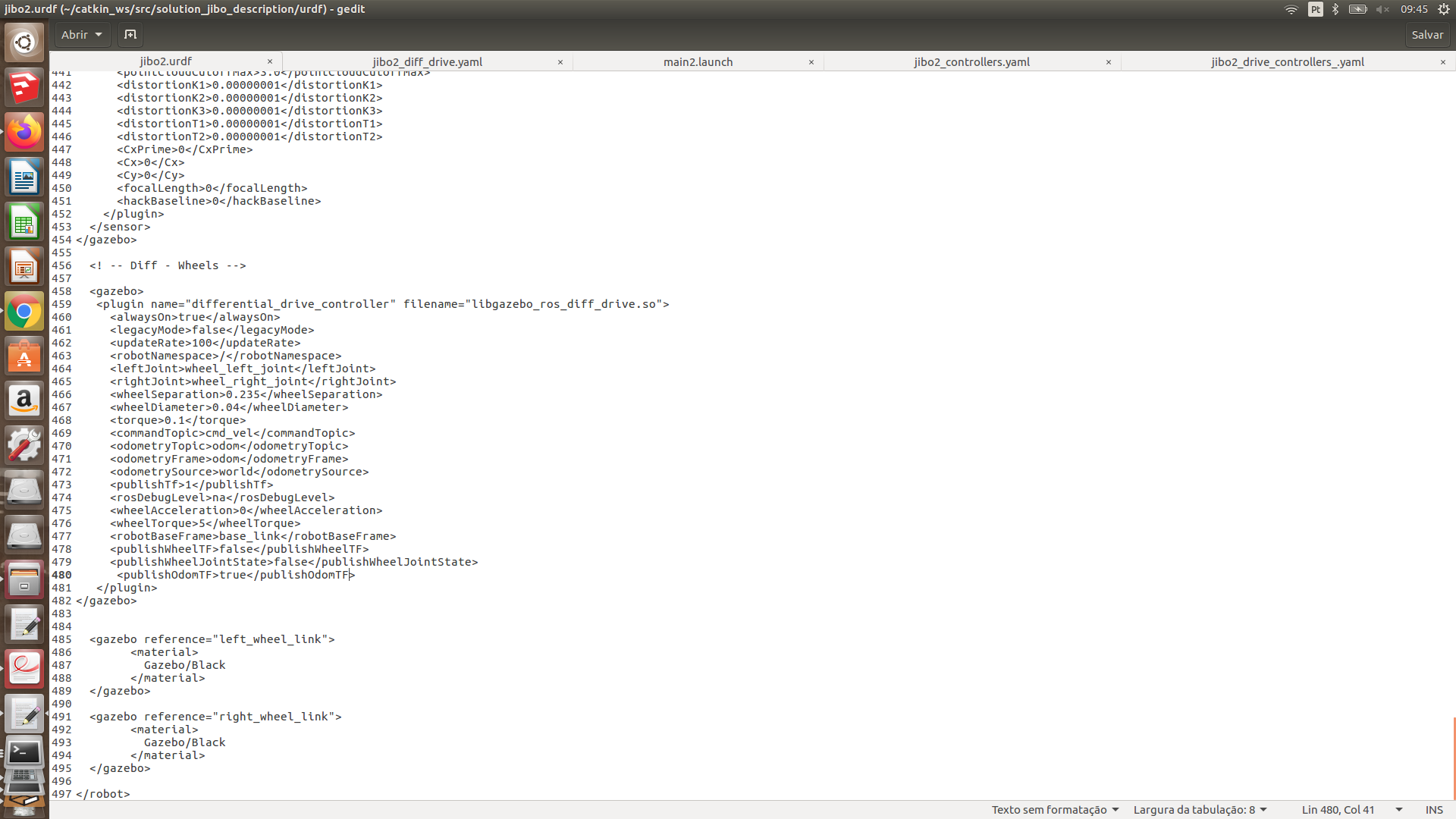
URDF:
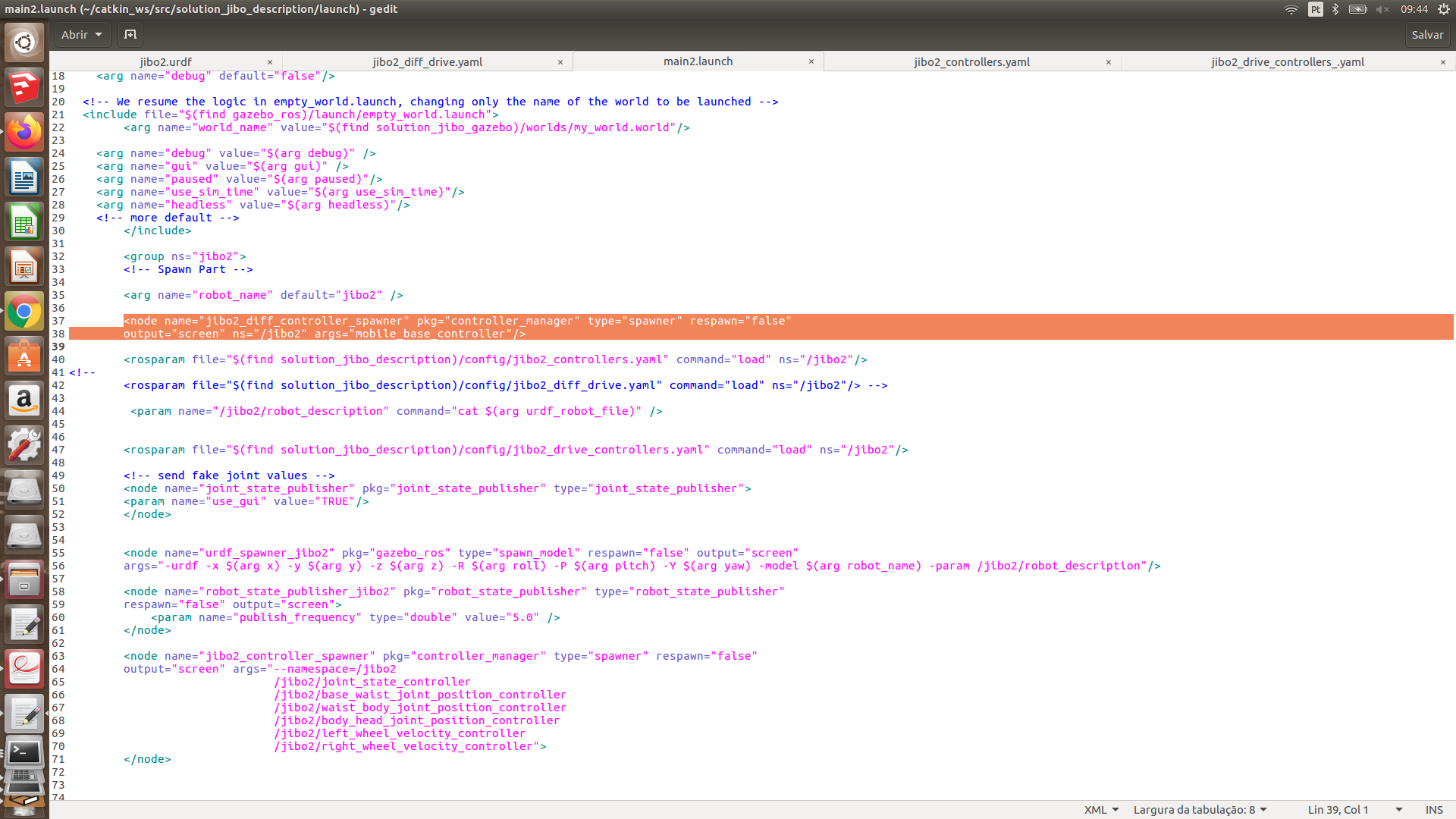
LAUNCH FILE:
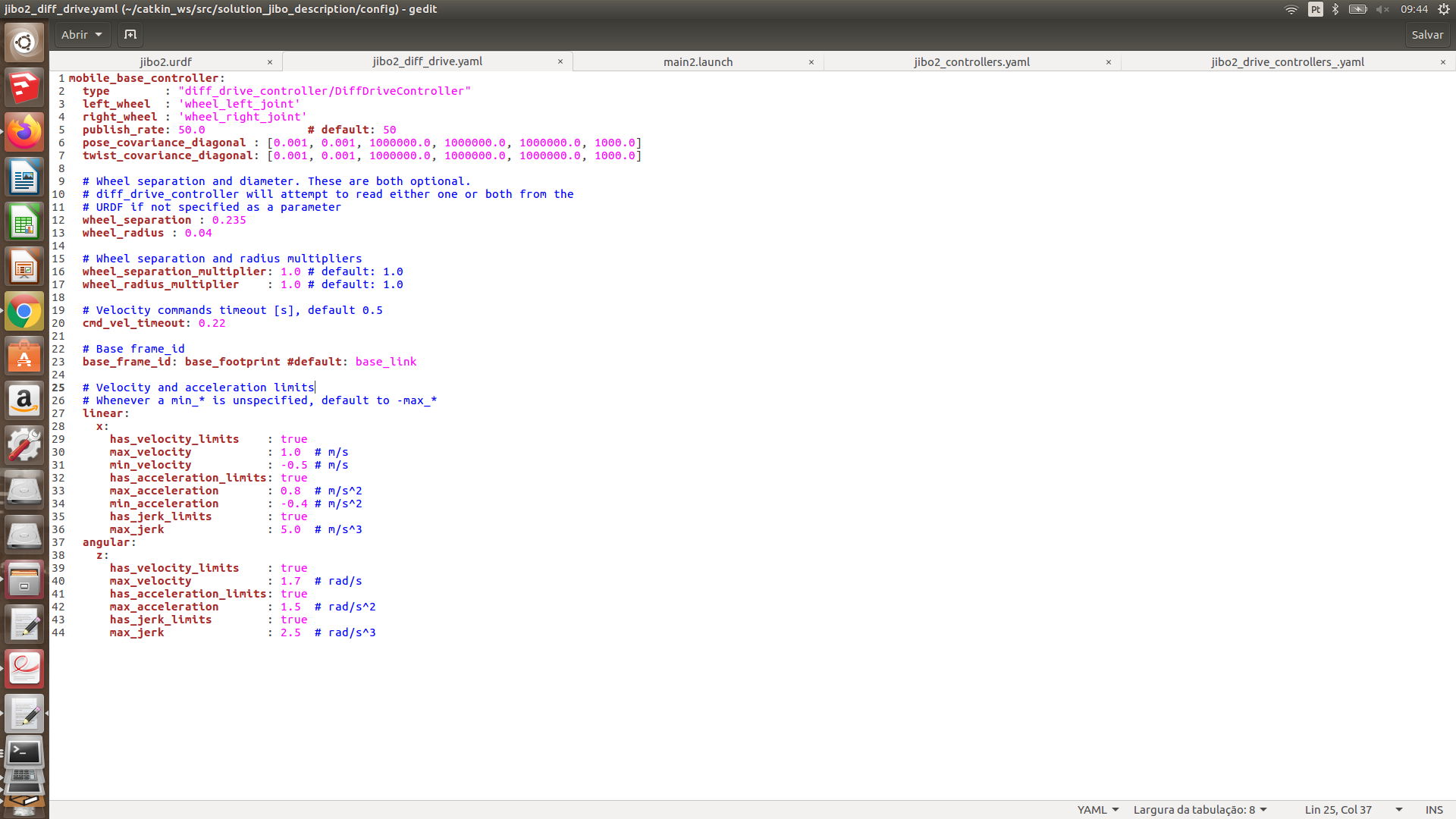
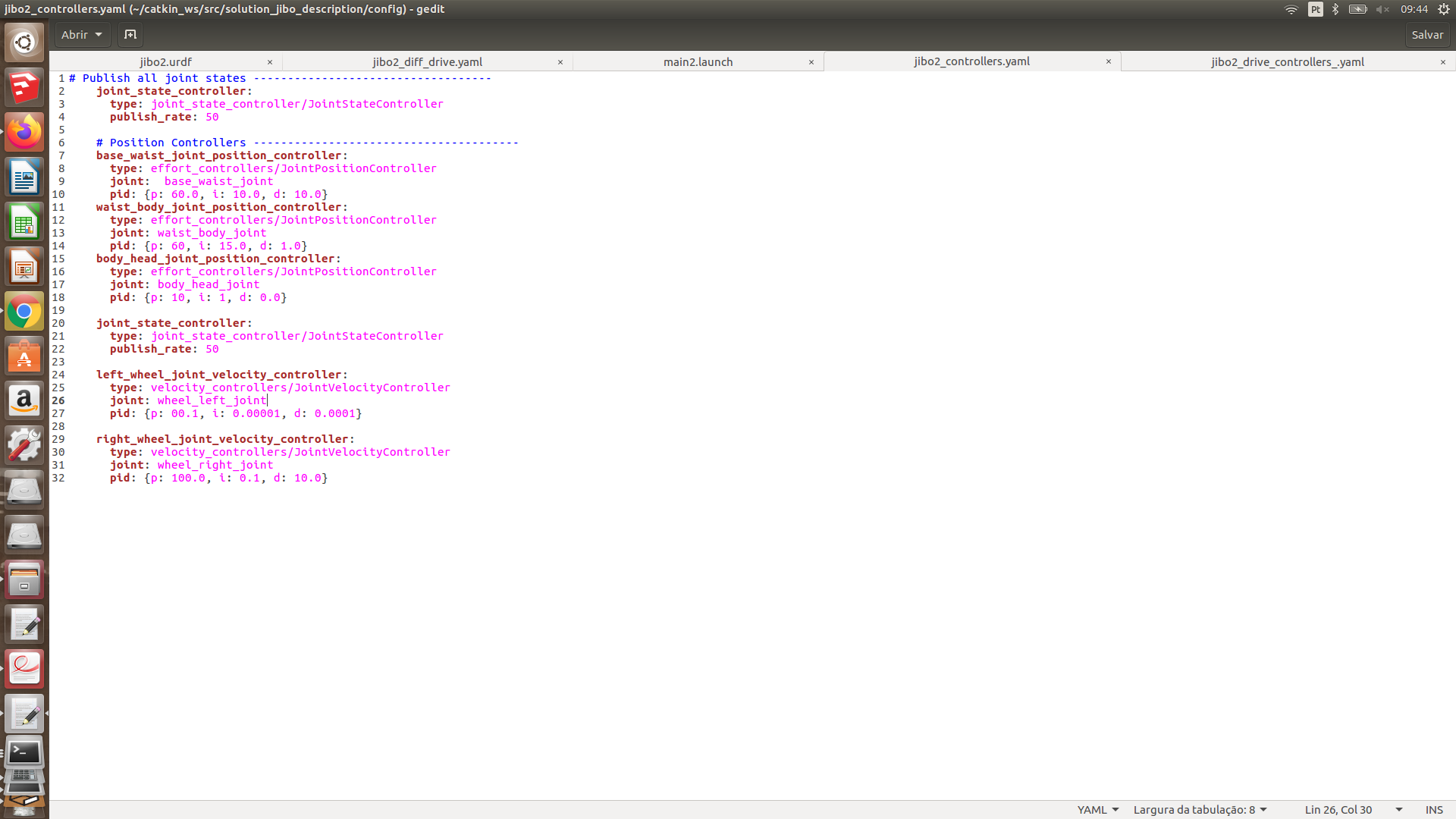
CONFIG FILES:
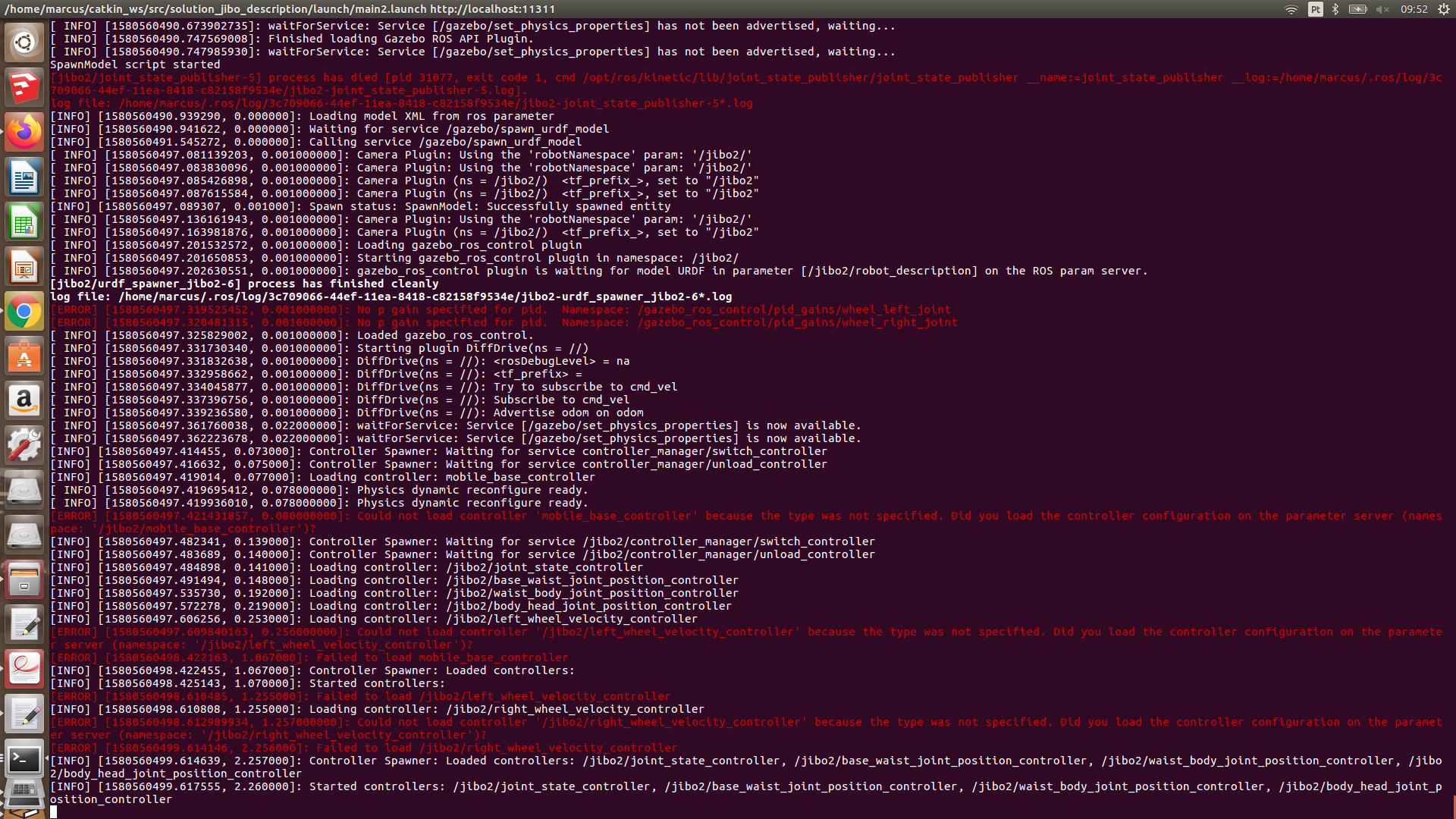
And the error:
summarizing it: "Could not load controller “mobile_base_controller because…”
and: (1)Failed to load mobile_base controller
(2) Failed to load jibo2/right_wheel_velocity_controller
(3) Failed to load jibo2/left_wheel_velocity_controller
I imagine the error 2 and 3 happens because of the first .yaml (diff-drive type) was not correctly loaded. I tried to load the yaml file without put the name space, out of the group=“jibo2” area…but no success.
Which is my error, please?
Thanks
Marcus
Hi,
WOW super cool upgrade!
So to help you better, we would need you to create a ROSject in ROSDevelopementStudio. That way we can concentrate on debugging the code, and not managing installation dependencies and so on.
So please follow these steps in order for us to be able to debug and help you in the most efficient way:
- Go to ROSDevelopmenetStudio
- Create ROSject for the version of Ubuntu and ROS that you are using localy.
- Upload there your code and test everything launches as it does in your LOCAL machine.
- In the ROSject notebook, add the instructions to reproduce your issue.
Then I will have a deeper look in your project and if your code is in a git, I can try to fix it and make a push request.
Hope to hear form you soon ;).
1 Like
@duckfrost I will put the pkg next month, I am very busy finishing other project this month.
I really am confused, because this pkg was working on my Ubuntu 16.04-kinetic
and now I have upgraded to 18.04- Melodic and the simulation does not work anymore, Gazebo 9 does not open, a lot errors showed in screen…and is the same pkg that was working before.
Could you say me why this is happening?
Well, I will try to make it work again in ROSJEct, I believe you still use the 16.04 with kinetic configuration right? So maybe it works properly!