Hi
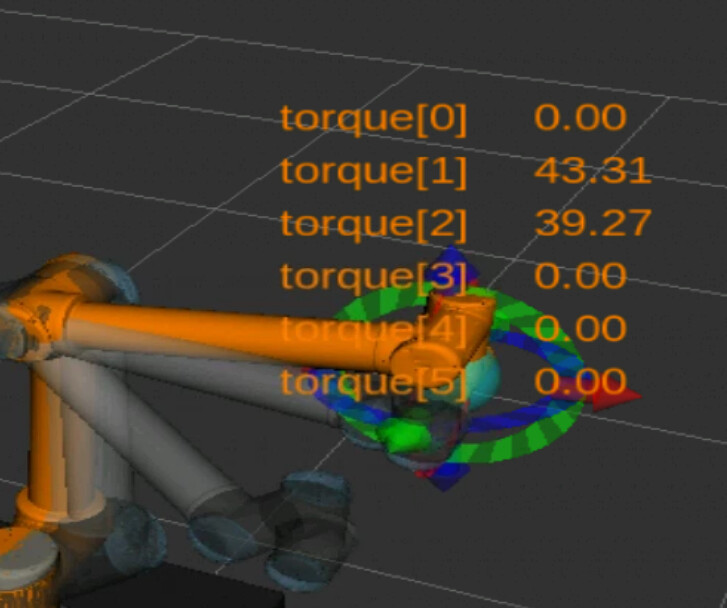
I have a question, i see that motion planing calculates the torques on the joints. as the picture shows.
i clicked MotionPlanning → Planing Metrics → show joint torques.
I can understand that it will calculate the necessary torques from URDF file, is there a way to output the “current torques” calculated durring the movement,
So say i want to go from postion A -B motion planing would calculate a couple of intermediary points, is it possible to print the torques that joints will have during travel to those points? also is it possible to change payload with a topic. From what i understand ROS is all about massages and topics so on some level i should be able to access those calculations, without going in to to much details and implementing my own CPP torque calculators?
Thanks Ziga
Hello @ziga.rupret ,
As far as I know, this is not possible, at least out of the box. The reason is that this data is not published on any topic by default, but calculated internally by MoveIt. It should be possible to get this data from MoveIt though, but I’ve never tried something like that. You can have a look at this post for further details: Getting real time torque values from Rviz during move execution - ROS Answers: Open Source Q&A Forum
Best,
thanks for the replay @albertoezquerro
Is there any other straight forward way of calculating the torques from URDF model, i have been working with ros only for few months now and i am nowhere near capable of writing my own URDF parser to get inertia values, and use friction on the joints and gravity to calculate the torques needed.
I am asking because the mini cheetah motors allow for reading the amperage on the motors, so it will be very useful if we can use ROS and URDF files to calculate the inertia and other non linearity to in the system so we can have some “cooperation” with the systems that are possible to build.
Is there any courses that you would recommend me take if i want to dive in deeper in to this?
Ziga
Hello @ziga.rupret ,
I would suggest the Robot Dynamics and URDF courses to get a good starting point.