Hello Everyone,
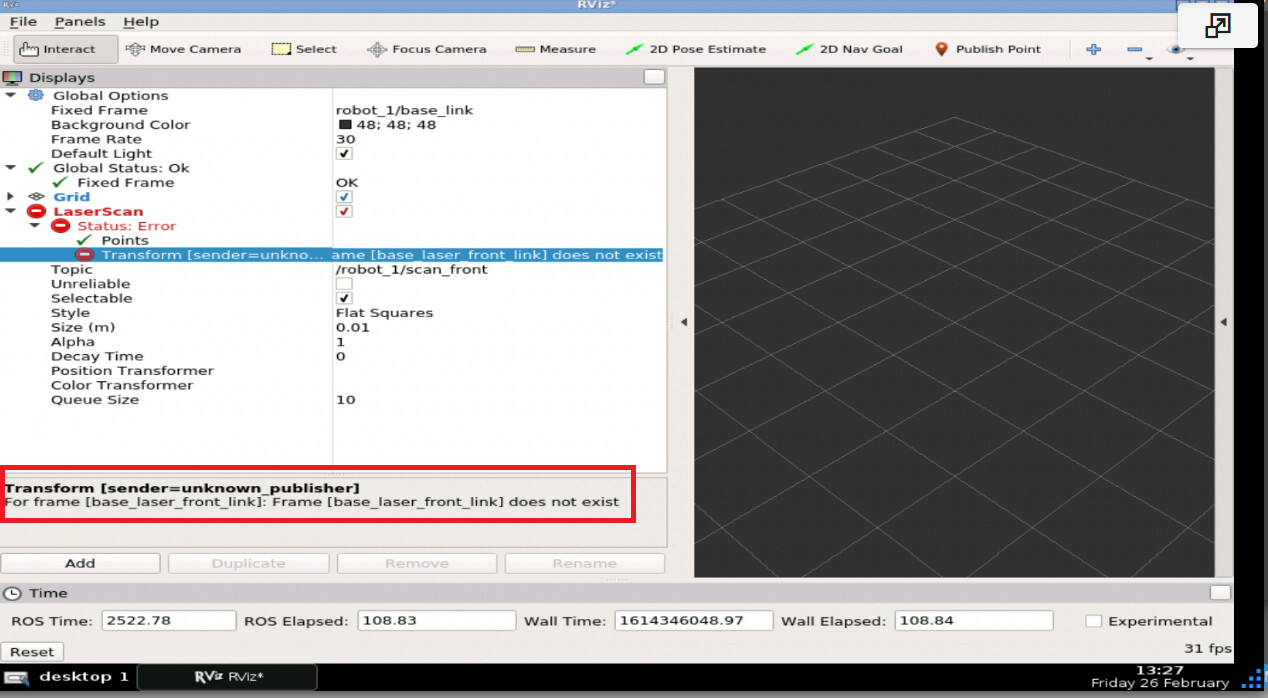
I hope you will be in good health. Currently I am working on multiple robot exploration on KUKA youBot mobile manipulator, when i launch multiple youBots i cant see laser scan data in rviz for any of the robots, it give me error that Frame [base_laser_front_link] does not exist while it does exist screen shot attached. On the other hand when i launch single robot it works fine i can see laser scan data. The only thing i have change in multibot exploration live class tutorial is kubokis.launch file in which i have replaced kubokis description and meshes with youBot description and meshes. pictures are attached below, kindly help me out please.
regards,
kobukis.launch file
<!-- Launch file for running the multirobot simulation on gazebo -->
<!-- Launches Kobuki Gazebo simulation in an empty world -->
<launch>
<env name="GAZEBO_RESOURCE_PATH" value="$(find youbot_description)/includes/meshes"/>
<!-- start Gazebo with an empty world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="false"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
<arg name="world_name" value="$(find rrt_exploration_tutorials)/launch/includes/worlds/house.world"/>
</include>
<!-- spawn robot 1-->
<group ns="/robot_1">
<include file="$(find multiple_youbot_sim)/launch/robot.launch.xml">
<arg name="robot_name" value="robot_1"/>
<arg name="init_pose" value="-x 0.0 -y 0.0 -z 0.0"/>
</include>
</group>
<!-- spawn robot 2-->
<group ns="/robot_2">
<include file="$(find multiple_youbot_sim)/launch/robot.launch.xml">
<arg name="robot_name" value="robot_2"/>
<arg name="init_pose" value="-x 0.0 -y -0.8 -z 0.0"/>
</include>
</group>
<!-- spawn robot 3-->
<group ns="/robot_3">
<include file="$(find multiple_youbot_sim)/launch/robot.launch.xml">
<arg name="robot_name" value="robot_3"/>
<arg name="init_pose" value="-x 0.0 -y 0.8 -z 0.0"/>
</include>
</group>
<!-- transformation between robots -->
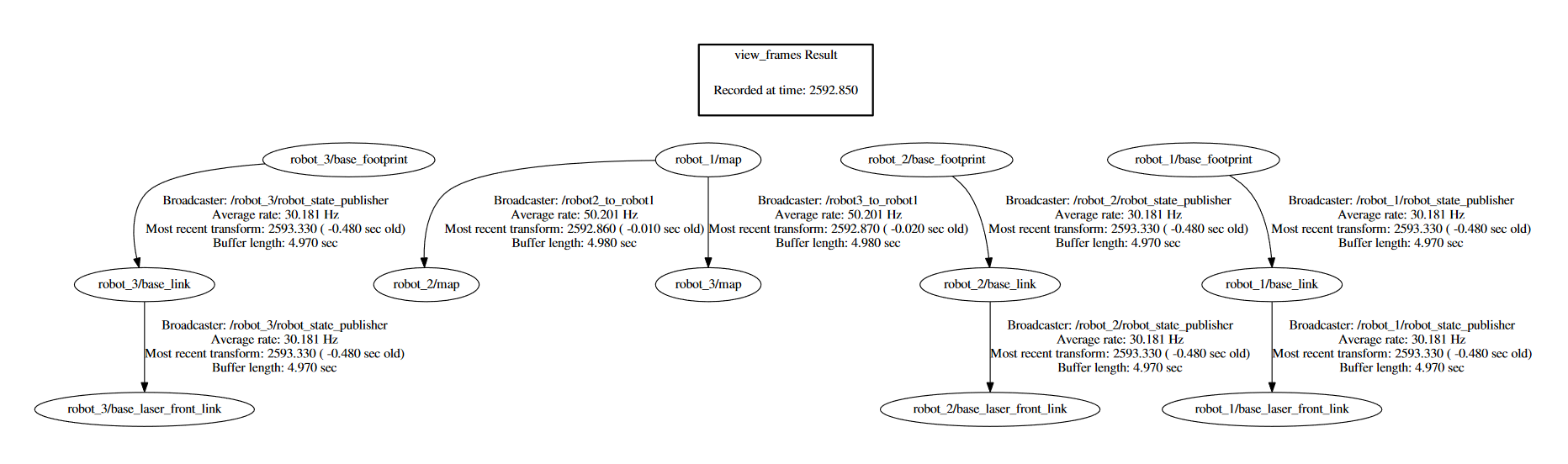
<node pkg="tf" type="static_transform_publisher" name="robot2_to_robot1" args="0 -0.8 0 0 0 0 /robot_1/map /robot_2/map 20" />
<node pkg="tf" type="static_transform_publisher" name="robot3_to_robot1" args="0 0.8 0 0 0 0 /robot_1/map /robot_3/map 20" />
<!-- Map megring (know inital position case)-->
<!-- run RViz node (visualization)
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find multiple_turtlebots_sim)/rviz_config/three.rviz">
<remap from="move_base_simple/goal" to="robot_1/move_base_simple/goal"/>
</node>-->
</launch>
robot.launch.xml file
<!-- Spawns Kobuki inside a Gazebo simulation -->
<launch>
<arg name="robot_name"/>
<arg name="init_pose"/>
<param name="robot_description"
command="$(find xacro)/xacro.py '$(find youbot_description)/robots/youbot_base_only.urdf.xacro'"/>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_$(arg robot_name)"
args="$(arg init_pose) -unpause -urdf -param robot_description -model $(arg robot_name)" respawn="false">
</node>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
<param name="use_tf_static" type="bool" value="true" />
<param name="tf_prefix" type="string" value="$(arg robot_name)"/>
</node>
</launch>