Hello, I have created a launch file that can successfully launch and control two UR5 robots. But it seems that the TF of both the robots is not published separately, they are published as one. I need two to have two unique TF’s for both the robots. I dont know where I have made mistake.
here is my launch file
<?xml version="1.0"?>
<launch>
<param name="red_box_path" type="str" value="$(find ur5_notebook)/urdf/red_box.urdf"/>
<arg name="robot_name"/>
<!-- <arg name="init_pose"/> -->
<arg name="limited" default="true"/>
<arg name="paused" default="false"/>
<arg name="gui" default="true"/>
<arg name="debug" default="false" />
<arg name="sim" default="true" />
<!-- startup simulated world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" default="worlds/empty.world"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="gui" value="$(arg gui)"/>
</include>
<node name="bin" pkg="gazebo_ros" type="spawn_model" args="-file $(find ur5_notebook)/urdf/bin.urdf -urdf -model bin -y 0.8 -x -0.5 -z 0.05" />
<!-- <node name="bin2" pkg="gazebo_ros" type="spawn_model" args="-file $(find ur5_notebook)/urdf/bin.urdf -urdf -model bin -y -0.8 -x 0.5 -z 0.05" /> -->
<!-- spawn the conveyor_belt in gazebo -->
<node name="spawn_conveyor_belt" pkg="gazebo_ros" type="spawn_model" args="-file $(find ur5_notebook)/urdf/conveyor_belt.urdf -urdf -model conveyor_belt" />
<!-- spawn the conveyor_belt in gazebo -->
<!-- the red blocks spawner node -->
<node name="blocks_spawner" pkg="ur5_notebook" type="blocks_spawner" output="screen" />
<!-- <node name="blocks_spawner2" pkg="ur5_notebook" type="blocks_spawner2" output="screen" /> -->
<node name="blocks_poses_publisher" pkg="ur5_notebook" type="blocks_poses_publisher" output="screen" />
<group ns="robot1">
<param name="tf_prefix" value="robot1_tf" />
<include file="$(find ur_gazebo)/launch/ur5.launch">
<arg name="init_pose" value="-z 0.2 -y 0.7"/>
<arg name="robot_name" value="robot1"/>
<!-- <node name="spawn_gazebo_model" pkg="gazebo_ros" type="spawn_model" args="-urdf -param robot_description -model $(arg robot_name)-x 0.5 -z 0.2 -y 1.1" respawn="false" output="screen" /> -->
</include>
<include file="$(find ur5_moveit_config)/launch/move_group.launch">
<arg name="limited" default="$(arg limited)"/>
<arg name="debug" default="$(arg debug)" />
</include>
<!-- <node name="ur5_vision" pkg="ur5_notebook" type="ur5_vision.py" output="screen" />
<node name="ur5_gripper" pkg="ur5_notebook" type="ur5_gripper.py" output="screen"/> -->
<remap if="$(arg sim)" from="follow_joint_trajectory" to="arm_controller/follow_joint_trajectory"/>
<node name="ur5_vision_robot1" pkg="ur5_notebook" type="ur5_vision_robot1.py" output="screen" />
<!-- <node name="ur5_mp_robot1" pkg="ur5_notebook" type="ur5_mp_robot1.py" output="screen" /> -->
<node name="ur5_gripper_robot1" pkg="ur5_notebook" type="ur5_gripper_robot1.py" output="screen"/>
</group>
<group ns="robot2">
<param name="tf_prefix" value="robot2_tf" />
<include file="$(find ur_gazebo)/launch/ur5_r2.launch">
<arg name="init_pose" value="-z 0.2 -y -0.70"/>
<arg name="robot_name" value="robot2"/>
<!-- <node name="spawn_gazebo_model" pkg="gazebo_ros" type="spawn_model" args="-urdf -param robot_description -model $(arg robot_name)-x 0.5 -z 0.2 -y 1.1" respawn="false" output="screen" /> -->
</include>
<!-- <node name="blocks_poses_publisher" pkg="ur5_notebook" type="blocks_poses_publisher" output="screen" /> -->
<!-- <node name="ur5_mp" pkg="ur5_notebook" type="ur5_mp.py" output="screen" /> -->
<remap if="$(arg sim)" from="follow_joint_trajectory" to="arm_controller/follow_joint_trajectory"/>
<include file="$(find ur5_r2_moveit_config)/launch/move_group.launch">
<arg name="limited" default="$(arg limited)"/>
<arg name="debug" default="$(arg debug)" />
</include>
<!-- <node name="ur5_vision" pkg="ur5_notebook" type="ur5_vision.py" output="screen" />
<node name="ur5_gripper" pkg="ur5_notebook" type="ur5_gripper.py" output="screen"/> -->
<node name="ur5_vision" pkg="ur5_notebook" type="ur5_vision.py" output="screen" />
<node name="ur5_r2_gripper" pkg="ur5_notebook" type="ur5_gripper.py" output="screen"/>
<!-- Remap follow_joint_trajectory -->
</group>
<!--
<node name="ur5_mp" pkg="ur5_notebook" type="ur5_mp.py" output="screen" />
<node name="ur5_mp_robot1" pkg="ur5_notebook" type="ur5_mp_robot1.py" output="screen" /> -->
<!-- for ros control to be used with scara robot -->
<!-- <param name="/scara_robot_left/robot_description" textfile="$(find two_scara_collaboration)/urdf/scara_robot_left.urdf" />-->
<!-- spawn the red_box in gazebo -->
<!-- node name="spawn_red_box" pkg="gazebo_ros" type="spawn_model" args="-file $(find ur5_notebook)/urdf/red_box.urdf -urdf -model red_box"/ -->
</launch>
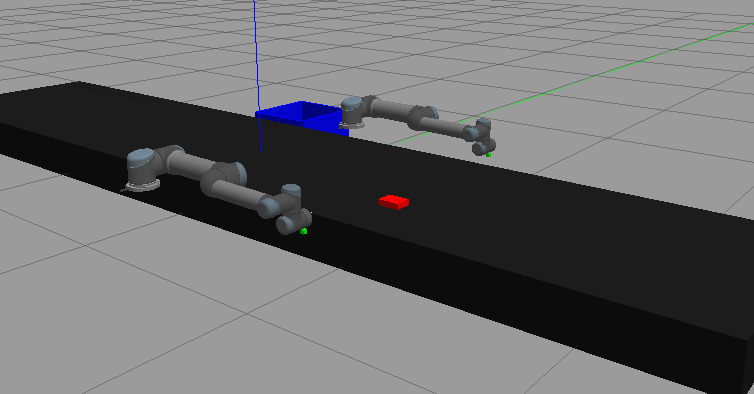
I get the following output in Gazebo
and here is the output fromrosrun rqt_tf_tree rqt_tf_tree
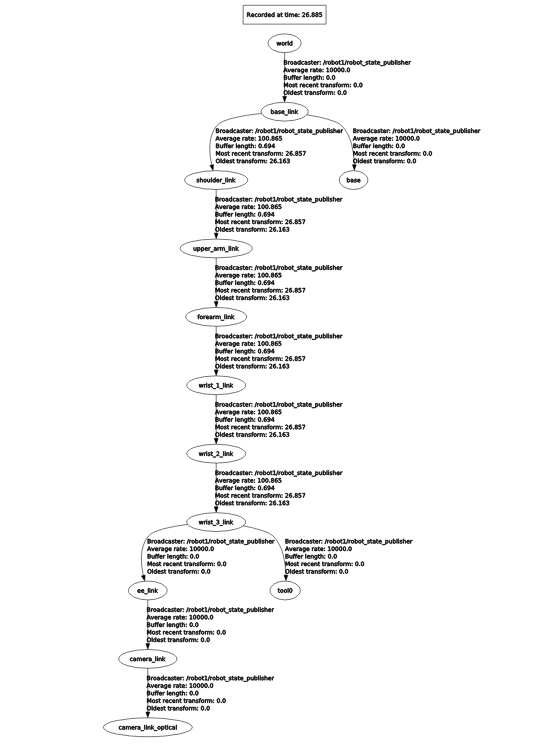
As seen from the above picture the world frame should share tf with the baselink of robot1 and robot2.