Hi the constructs Team,
I hope all are Fine, I am facing a problem the problem is in the localization part 2 of the rosject (the real robot project) of the ROS2 NAVIGATION IN 5 DAYS COURSE we are asked in this part to write a lunch file that communicate with amcl config file which will localize the robot after launching that file and moving the robot we should get this result in the rviz2
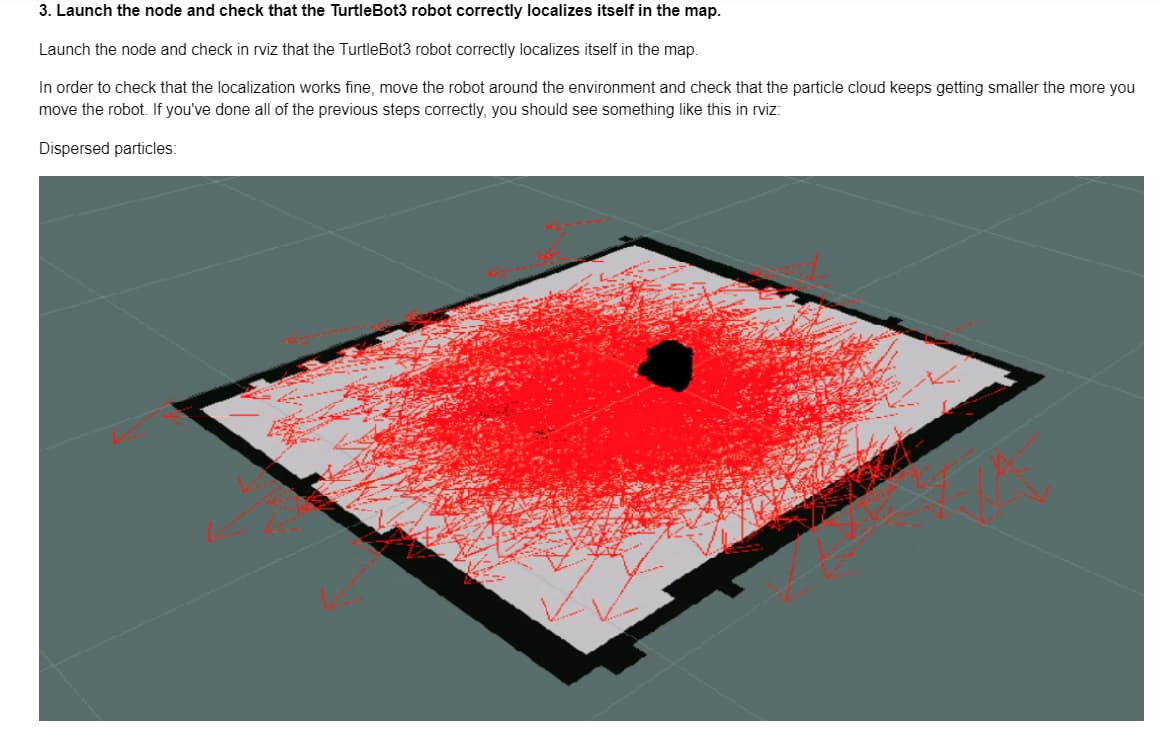
But the result i am getting when i run the launch file and when i move the robot is this
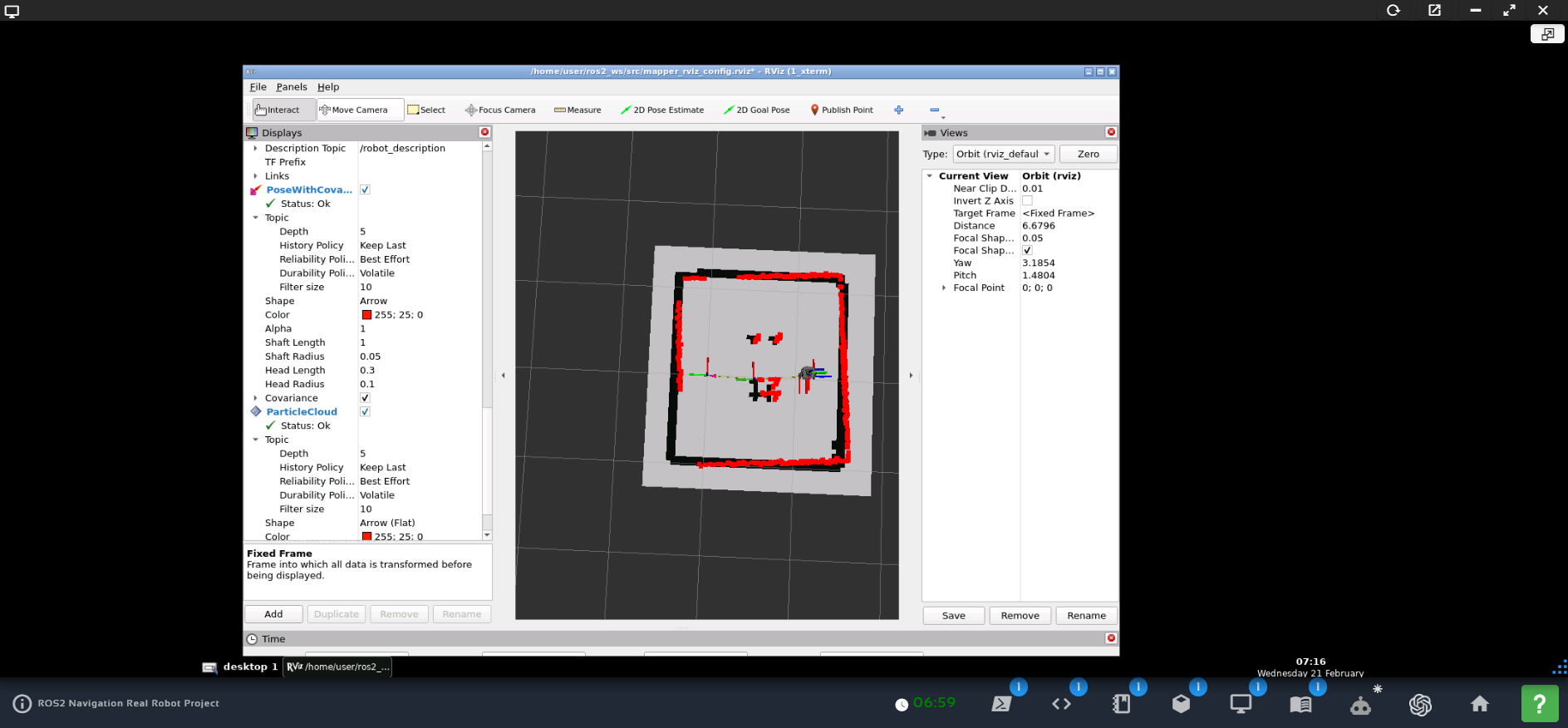
i am not getting the particles in that way but all the configuration are correct i hope anyone can help me or can tell me where is my mistake ![]()
Thank you,
Ghassan