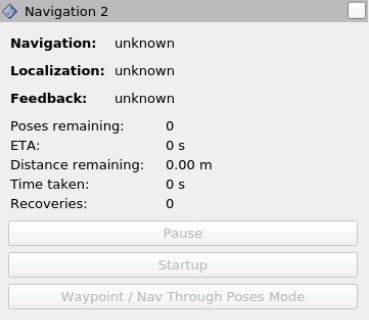
I have been working on the localization_server and path_planner_server for the ROS2 Navigation Course and everything seems to work okay except for the Navigation 2 panel in Rviz. All the buttons are greyed out (please see attached picture) but I was expecting them to be active to be able to use Waypoint mode and so on. I set the lifecycle_manager parameter ‘autostart’ to True as well. Am I missing something? You might be able to reproduce the situation if you launch the localization_server and path_planner_server following the steps explained in the course. Thanks in advance!
This seems like an Rviz2 issue. Do you get any error messages/warning from rviz2 in the terminal output?
Are you able to send 2D goal poses from the top panel?
Also, you can check what DDS implementation is being used with echo $RMW_IMPLEMENTATION. If it’s Fast-DDS, you can try switching to CycloneDDS by stopping the daemon and setting this environment variable in every terminal:
Rviz2 seems ok and yes I can send 2D goal poses no problem. The goals are reached by the robot correctly. The Feedback section on the panel becomes active when I navigate to a goal but the buttons are still greyed out. I should also say that the provided nav2_demo in the introduction part of the course works and the panel buttons are active. So obviously something is being done there to make it work. Any ideas?