Respected and dear Professor, I apologize for my many questions. But, I need them claified as I have to complete my project before 9th. I am very thankful for your kind responses.
So, I did exercise 4.7

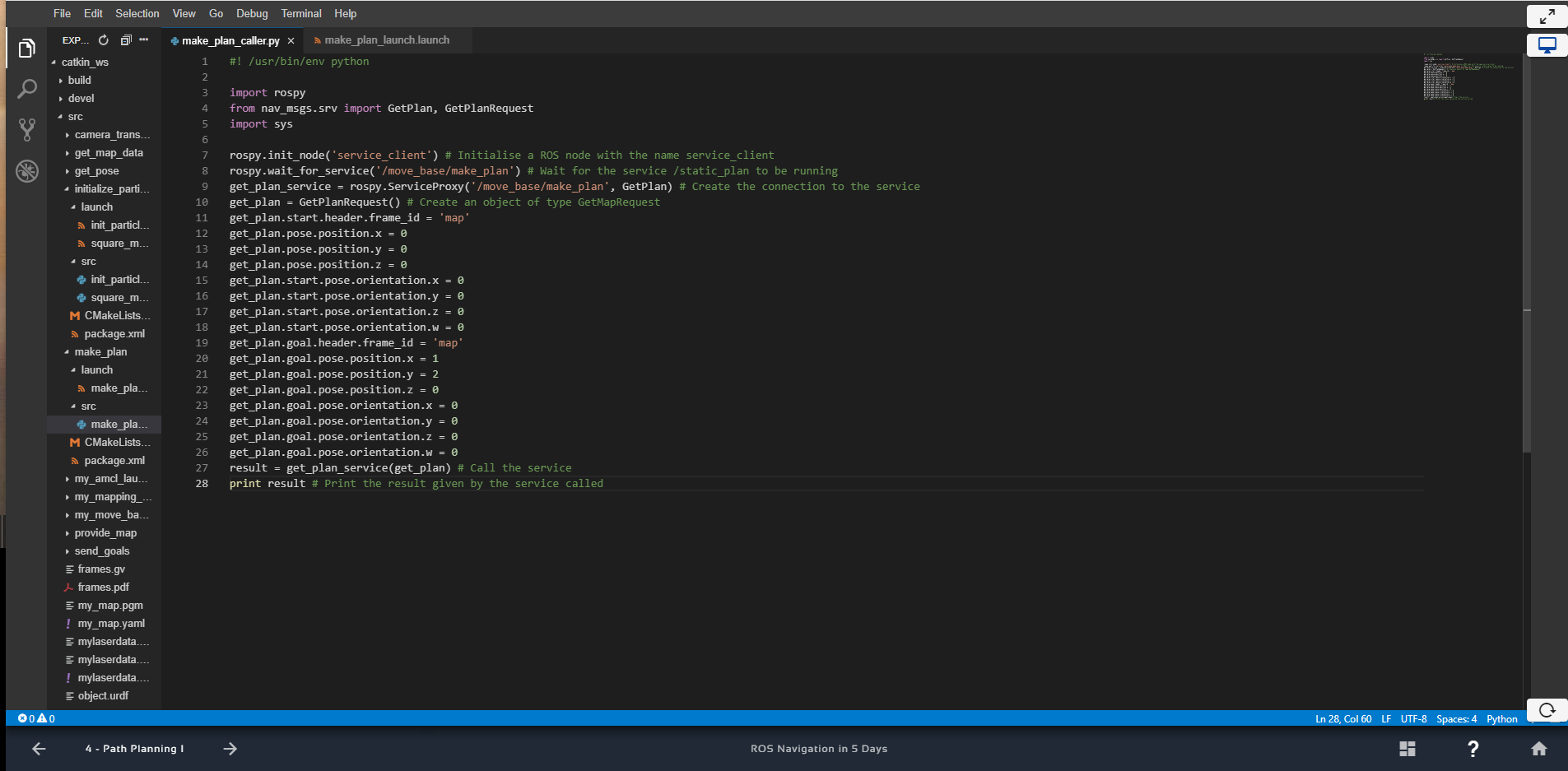
My code is given below:

I executed the command roslaunch make_plan make_plan_launch.launch but didn’t get anything proper in the output. I opened shell #2 and tried typing rosservice call …. As I’m typing rosservice call /move… I hit tab key and it was not autocompleting it. I tried writing manually, but even then it throw some error.
Then I saw the solution and added the missing part:
In terminal, I tried running roslaunch make_plan make_plan_launch.launch in shell #1 and rosservice call… in shell #2, again nothing happened.
- Would you please tell me why it’s not working.
- Do we give frame_id , position and orientation to tell that this is the location where we want to go ?
- In the last pic above, why is map, position and orientation defined twice ?