Hey guy’s!
I need some help with a Python program, I am now in the 5 days basic ROS program and I’m having truble with exercise 4.3 (Topics quiz).
In the Python program I want to publish to ‘/cmd_vel’ and I want to subscribe to ‘/kobuki/laser/scan’.
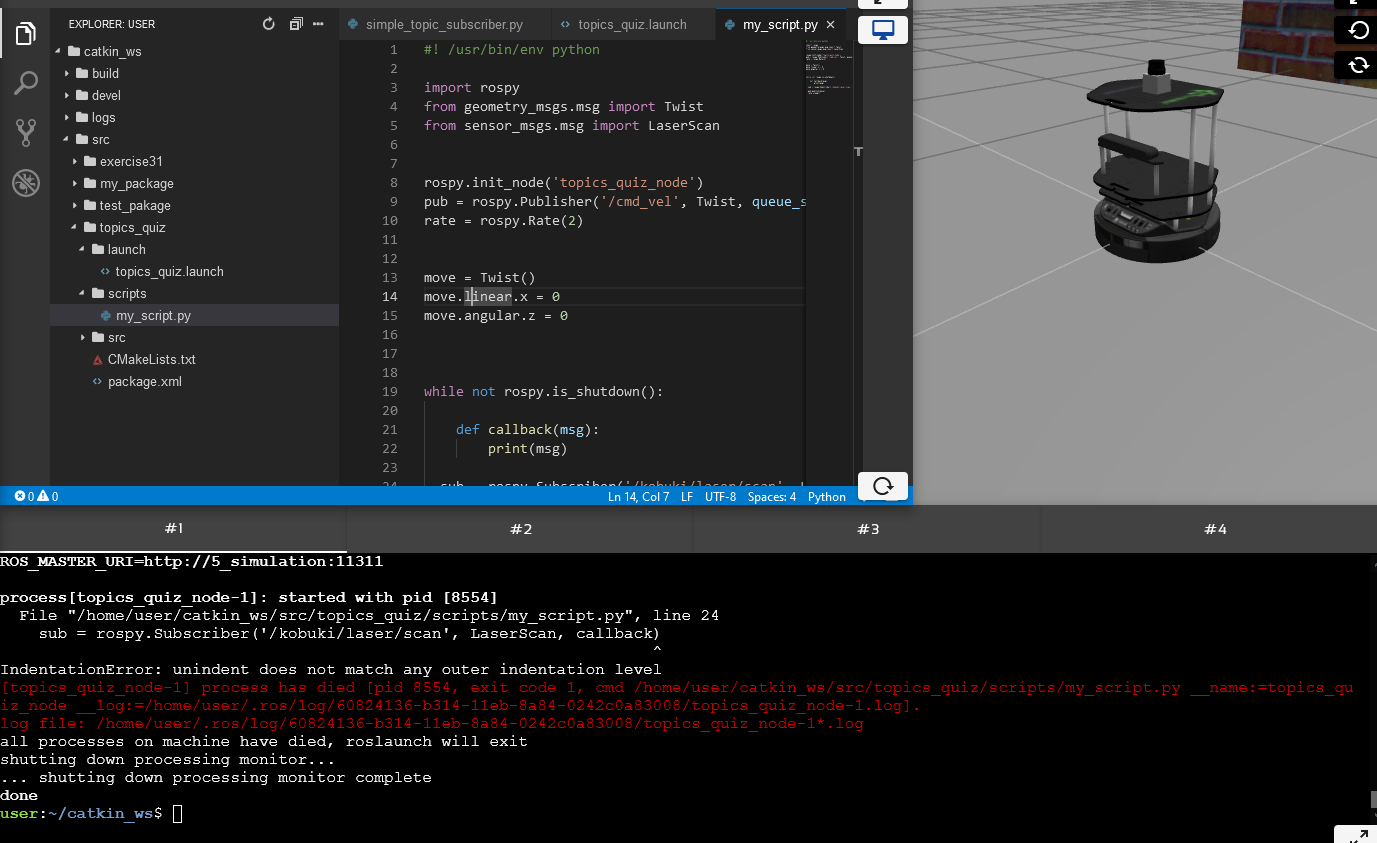
Every time I run it I have this error:
Python program:
#! /usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from sensor_msgs.msg import LaserScan
rospy.init_node('topics_quiz_node')
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
rate = rospy.Rate(2)
move = Twist()
move.linear.x = 0
move.angular.z = 0
while not rospy.is_shutdown():
def callback(msg):
print(msg)
sub = rospy.Subscriber('/kobuki/laser/scan', LaserScan, callback)
pub.publish(move)
rate.sleep()
When I comment out the sub = rospy. … and def callback then the program works.
Launch file:
< launch>
< !-- my package launch file →
< node pkg=“topics_quiz” type=“my_script.py” name=“topics_quiz_node” output=“screen”>
< node/>
< /launch>
Thank you for helping me!