Sorry, it was a little bit complicated
The summary:
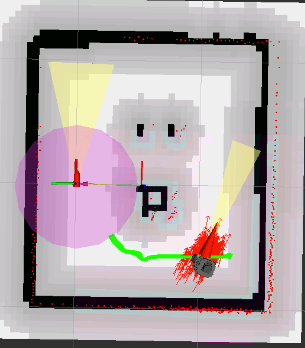
-Is thetranslation spread normal compared to the rotation that concentrates the particles? Reducing the translation noise I finally reduced it.
-I was worried about this message. But I ended up finding an answer
[bt_navigator-4] [ERROR] [1695819711.112090088] [bt_navigator]: Actionserver failed while executing action callback: "send_goal failed"
- A lot of times when I give a goal I get, And I have to launch everything again. So I have a problem with BT-navigator
[bt_navigator-4] [INFO] [1695819825.259601650] [bt_navigator]: Begin navigating from current location to (-0.02, -1.05)
[ERROR] [bt_navigator-4]: process has died [pid 12065, exit code -11, cmd '/opt/ros/foxy/lib/nav2_bt_navigator/bt_navigator --ros-args -r __node:=bt_navigator --params-file /home/user/ros2_ws/install/project_path_planning/share/project_path_planning/config/bt_navigator.yaml'].
- I also often get a problem of transform
[planner_server-2] [INFO] [1695822004.317905606] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransformargument target_frame - frame does not exist
-
I had a problem of blocking behavior of the robot but you were right it certainly was because of theglobal and local costmaps where the inflation was too big for small sized zone.
-
The robot never goes to the end of the path and sometimes really ends far. I suppose it is because of the particles orbecause of the accepted margin where it is considered arrived to the goal.
Following your last message
- I know I have to restart when I get the Info message. I will try separating the the launch files
[planner_server-2] [INFO] [1695978888.060696893] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "base_link" passed to canTransform argument source_frame - frame does not exist
- As I thought it only shows the data frome different topics, I didn’t thought it would have an impact requiring to restart it. I juste used to click reset to erase the previous launch remaining data
- The foot print is the one from the course. But the inflation was too big it works better now even if sometimes I have to send it multiple time before having it to start moving. Sometimes it is strange it tell me navigation succeed but it didn’t move to de goal
I will still test
Thank you for you patience