In Gazebo, I have launched a drone with a namespace. Then I launched rtabmap and move_base. It runs rtabmap successfully, however it fails to register any navigation goals with move_base. Can anyone please help me figure out why?
All my code is based off The Construct’s drone course and repository for quadrotor_navigation, found here: Bitbucket.
Here is my rtabmap/move_base launch file, which works fine if no namespace is specified:
<launch>
<arg name="database_path" default="rtabmap.db"/>
<arg name="args" default=""/>
<arg name="ns" default=""/>
<arg name="ns_set" default="false"/>
<arg name="wait_for_transform" default="0.2"/>
<group if="$(arg ns_set)">
<group ns="$(arg ns)">
<include file="$(find quadrotor_navigation)/launch/quadrotor_move_base_rtab.launch">
<arg name="base_frame_id" value="$(arg ns)/base_footprint"/>
<arg name="global_frame_id" value="$(arg ns)/map"/>
<arg name="odom_topic" value="/$(arg ns)/ground_truth/state" />
<arg name="laser_topic" value="/$(arg ns)/scan" />
<arg name="cmd_vel_topic" value="/$(arg ns)/cmd_vel"/>
</include>
</group>
</group>
<group unless="$(arg ns_set)">
<include file="$(find quadrotor_navigation)/launch/quadrotor_move_base_rtab.launch"/>
</group>
<!-- Mapping -->
<group ns="rtabmap">
<node name="rtabmap_$(arg ns)" pkg="rtabmap_slam" type="rtabmap" output="screen" args="$(arg args)">
<param name="database_path" type="string" value="$(arg database_path)"/>
<param name="frame_id" type="string" value="$(arg ns)/base_link"/>
<param name="odom_frame_id" type="string" value="world"/>
<param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<!-- inputs -->
<remap from="scan" to="/$(arg ns)/scan"/>
<remap from="rgb/image" to="/$(arg ns)/camera/rgb/image_raw"/>
<remap from="depth/image" to="/$(arg ns)/camera/depth/image_raw"/>
<remap from="rgb/camera_info" to="/$(arg ns)/camera/rgb/camera_info"/>
<!-- output -->
<remap from="grid_map" to="$(arg ns)/map"/>
<!-- RTAB-Map's parameters: do "rosrun rtabmap rtabmap (double-dash)params" to see the list of available parameters. -->
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Kp/MaxDepth" type="string" value="4.0"/>
<param name="Reg/Strategy" type="string" value="1"/>
<param name="Icp/CoprrespondenceRatio" type="string" value="0.3"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Vis/InlierDistance" type="string" value="0.1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>
<param name="Optimizer/Slam2D" type="string" value="true"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
</node>
</group>
</launch>
Here is the dependent quadrotor_move_base_rtab.launch file:
<launch>
<arg name="odom_frame_id" default="world"/>
<arg name="base_frame_id" default="base_footprint"/>
<arg name="global_frame_id" default="map"/>
<arg name="odom_topic" default="/ground_truth/state" />
<arg name="laser_topic" default="/scan" />
<arg name="cmd_vel_topic" default="/cmd_vel"/>
<arg name="custom_param_file" default="$(find quadrotor_navigation)/param/dummy.yaml"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find quadrotor_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find quadrotor_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find quadrotor_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find quadrotor_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find quadrotor_navigation)/param/dwa_local_planner_params.yaml" command="load" />
<rosparam file="$(find quadrotor_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find quadrotor_navigation)/param/global_planner_params.yaml" command="load" />
<rosparam file="$(find quadrotor_navigation)/param/navfn_global_planner_params.yaml" command="load" />
<!-- external params file that could be loaded into the move_base namespace -->
<rosparam file="$(arg custom_param_file)" command="load" />
<!-- reset frame_id parameters using user input data -->
<param name="global_costmap/global_frame" value="$(arg global_frame_id)"/>
<param name="global_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="local_costmap/global_frame" value="$(arg odom_frame_id)"/>
<param name="local_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="DWAPlannerROS/global_frame_id" value="$(arg odom_frame_id)"/>
<param name="global_costmap/obstacle_layer/scan/topic" value="$(arg laser_topic)"/>
<param name="local_costmap/obstacle_layer/scan/topic" value="$(arg laser_topic)"/>
<remap from="cmd_vel" to="$(arg cmd_vel_topic)"/>
<remap from="odom" to="$(arg odom_topic)"/>
<remap from="scan" to="$(arg laser_topic)"/>
</node>
</launch>
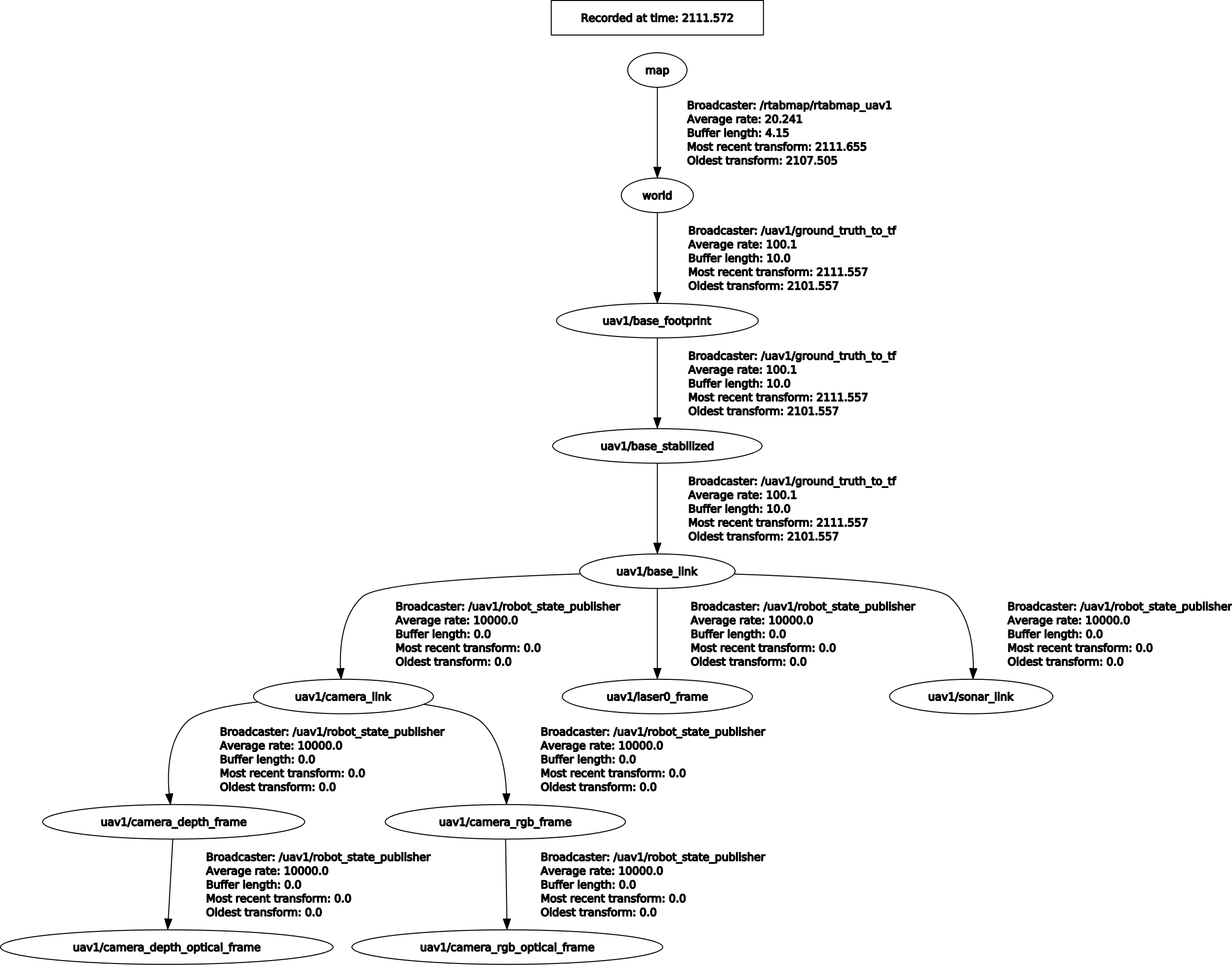
Here is the tf_tree with a namespace:
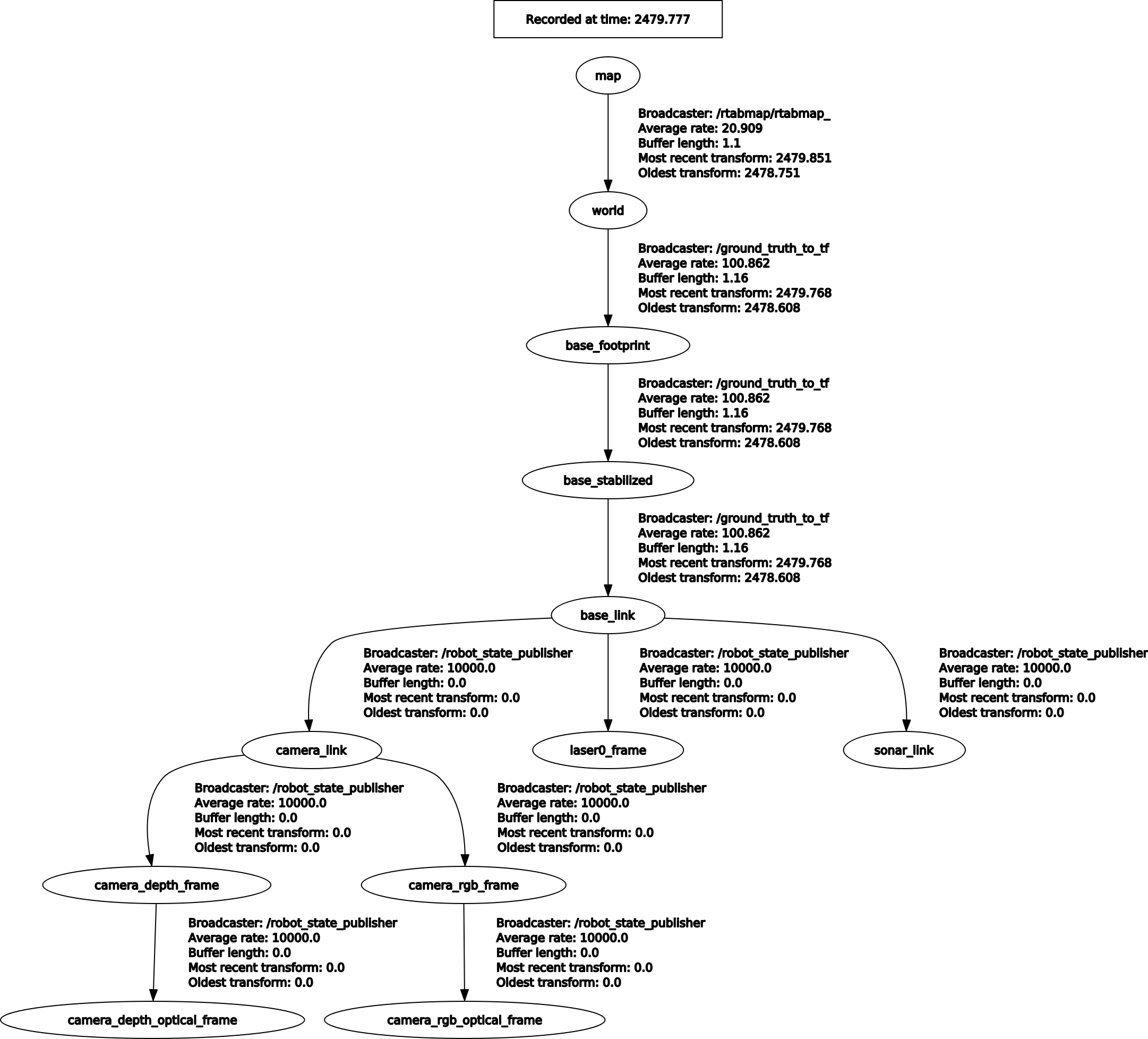
Here is the tf_tree without a namespace, for comparison:
Here is rosnode info move_base with a namespace, which seems to indicate that it has no map information:
Node [/uav1/move_base]
Publications:
* /rosout [rosgraph_msgs/Log]
* /uav1/cmd_vel [geometry_msgs/Twist]
* /uav1/move_base/current_goal [geometry_msgs/PoseStamped]
* /uav1/move_base/goal [move_base_msgs/MoveBaseActionGoal]
* /uav1/move_base/recovery_status [move_base_msgs/RecoveryStatus]
Subscriptions:
* /clock [rosgraph_msgs/Clock]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
* /uav1/move_base_simple/goal [geometry_msgs/PoseStamped]
Services:
* /uav1/move_base/get_loggers
* /uav1/move_base/set_logger_level
...
Here is rosnode info move_base with no namespace, for comparison:
Node [/move_base]
Publications:
* /cmd_vel [geometry_msgs/Twist]
* /move_base/DWAPlannerROS/cost_cloud [sensor_msgs/PointCloud2]
* /move_base/DWAPlannerROS/global_plan [nav_msgs/Path]
* /move_base/DWAPlannerROS/local_plan [nav_msgs/Path]
* /move_base/DWAPlannerROS/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/DWAPlannerROS/parameter_updates [dynamic_reconfigure/Config]
* /move_base/DWAPlannerROS/trajectory_cloud [sensor_msgs/PointCloud2]
* /move_base/NavfnROS/plan [nav_msgs/Path]
* /move_base/current_goal [geometry_msgs/PoseStamped]
* /move_base/feedback [move_base_msgs/MoveBaseActionFeedback]
* /move_base/global_costmap/costmap [nav_msgs/OccupancyGrid]
* /move_base/global_costmap/costmap_updates [map_msgs/OccupancyGridUpdate]
* /move_base/global_costmap/footprint [geometry_msgs/PolygonStamped]
* /move_base/global_costmap/inflation_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/global_costmap/inflation_layer/parameter_updates [dynamic_reconfigure/Config]
* /move_base/global_costmap/obstacle_layer/clearing_endpoints [sensor_msgs/PointCloud]
* /move_base/global_costmap/obstacle_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/global_costmap/obstacle_layer/parameter_updates [dynamic_reconfigure/Config]
* /move_base/global_costmap/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/global_costmap/parameter_updates [dynamic_reconfigure/Config]
* /move_base/global_costmap/static_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/global_costmap/static_layer/parameter_updates [dynamic_reconfigure/Config]
* /move_base/goal [move_base_msgs/MoveBaseActionGoal]
* /move_base/local_costmap/costmap [nav_msgs/OccupancyGrid]
* /move_base/local_costmap/costmap_updates [map_msgs/OccupancyGridUpdate]
* /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped]
* /move_base/local_costmap/inflation_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/local_costmap/inflation_layer/parameter_updates [dynamic_reconfigure/Config]
* /move_base/local_costmap/obstacle_layer/clearing_endpoints [sensor_msgs/PointCloud]
* /move_base/local_costmap/obstacle_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/local_costmap/obstacle_layer/parameter_updates [dynamic_reconfigure/Config]
* /move_base/local_costmap/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/local_costmap/parameter_updates [dynamic_reconfigure/Config]
* /move_base/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /move_base/parameter_updates [dynamic_reconfigure/Config]
* /move_base/recovery_status [move_base_msgs/RecoveryStatus]
* /move_base/result [move_base_msgs/MoveBaseActionResult]
* /move_base/status [actionlib_msgs/GoalStatusArray]
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /clock [rosgraph_msgs/Clock]
* /ground_truth/state [nav_msgs/Odometry]
* /map [nav_msgs/OccupancyGrid]
* /move_base/cancel [unknown type]
* /move_base/global_costmap/footprint [geometry_msgs/PolygonStamped]
* /move_base/goal [move_base_msgs/MoveBaseActionGoal]
* /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped]
* /move_base_simple/goal [unknown type]
* /scan [sensor_msgs/LaserScan]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Services:
* /move_base/DWAPlannerROS/set_parameters
* /move_base/NavfnROS/make_plan
* /move_base/clear_costmaps
* /move_base/get_loggers
* /move_base/global_costmap/inflation_layer/set_parameters
* /move_base/global_costmap/obstacle_layer/set_parameters
* /move_base/global_costmap/set_parameters
* /move_base/global_costmap/static_layer/set_parameters
* /move_base/local_costmap/inflation_layer/set_parameters
* /move_base/local_costmap/obstacle_layer/set_parameters
* /move_base/local_costmap/set_parameters
* /move_base/make_plan
* /move_base/set_logger_level
* /move_base/set_parameters
...
I would greatly appreciate any help at all.