HI
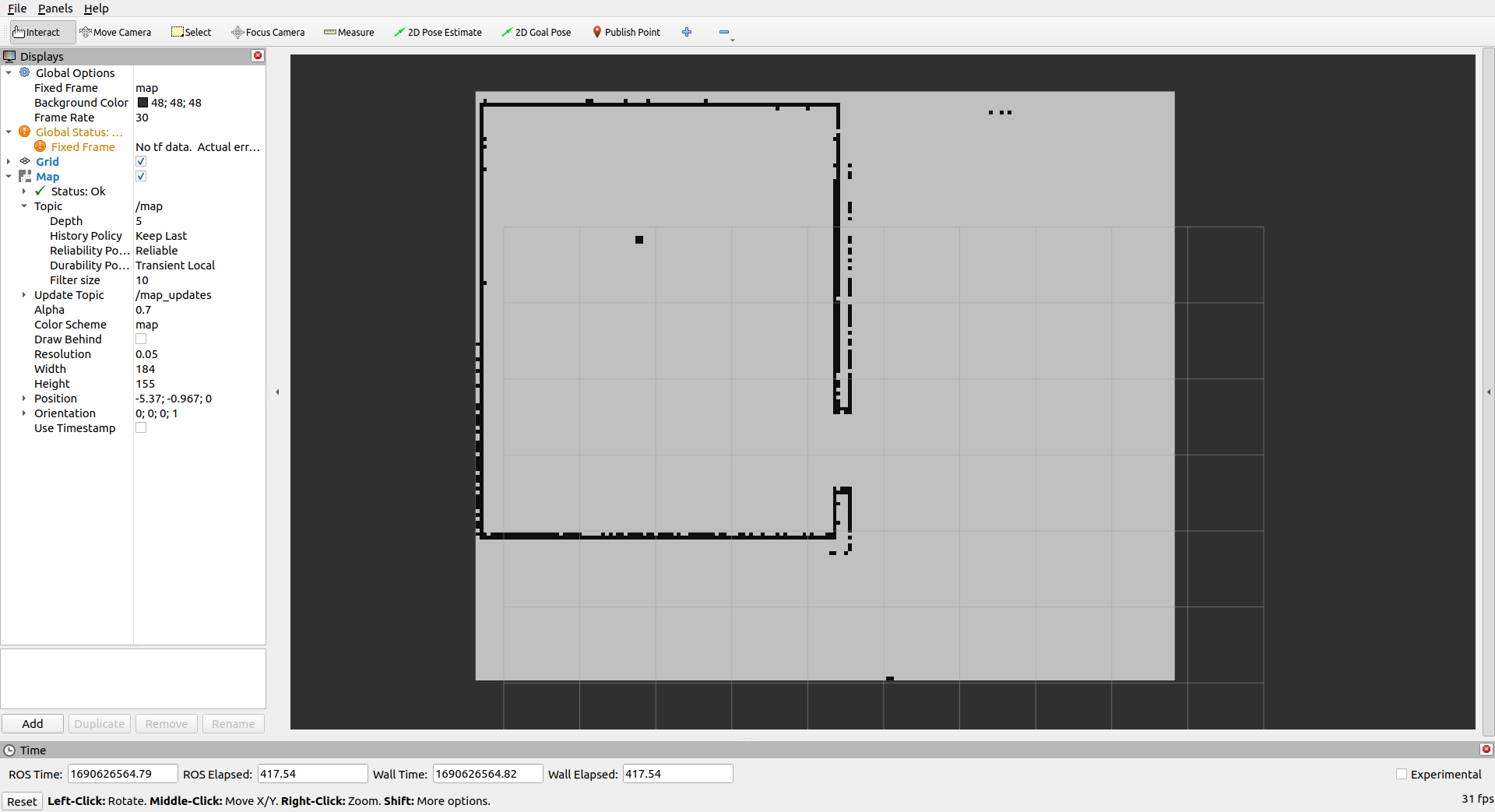
I am not able to get tf data after running map_sever. I am trying to visualize map after generating it with slam tool box. No tf data is being published. I am using humble.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
map_file = os.path.join(get_package_share_directory('mapping'), 'config', 'my_map.yaml')
return LaunchDescription([
# Node(
# package='rviz2',
# executable='rviz2',
# name='rviz2',
# parameters=[{'use_sim_time': True}],
# output='screen'),
Node(
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[{'use_sim_time': True},
{'yaml_filename':map_file},
]),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_mapper',
output='screen',
parameters=[{'use_sim_time': True},
{'autostart': True},
{'node_names': ['map_server']}])
])