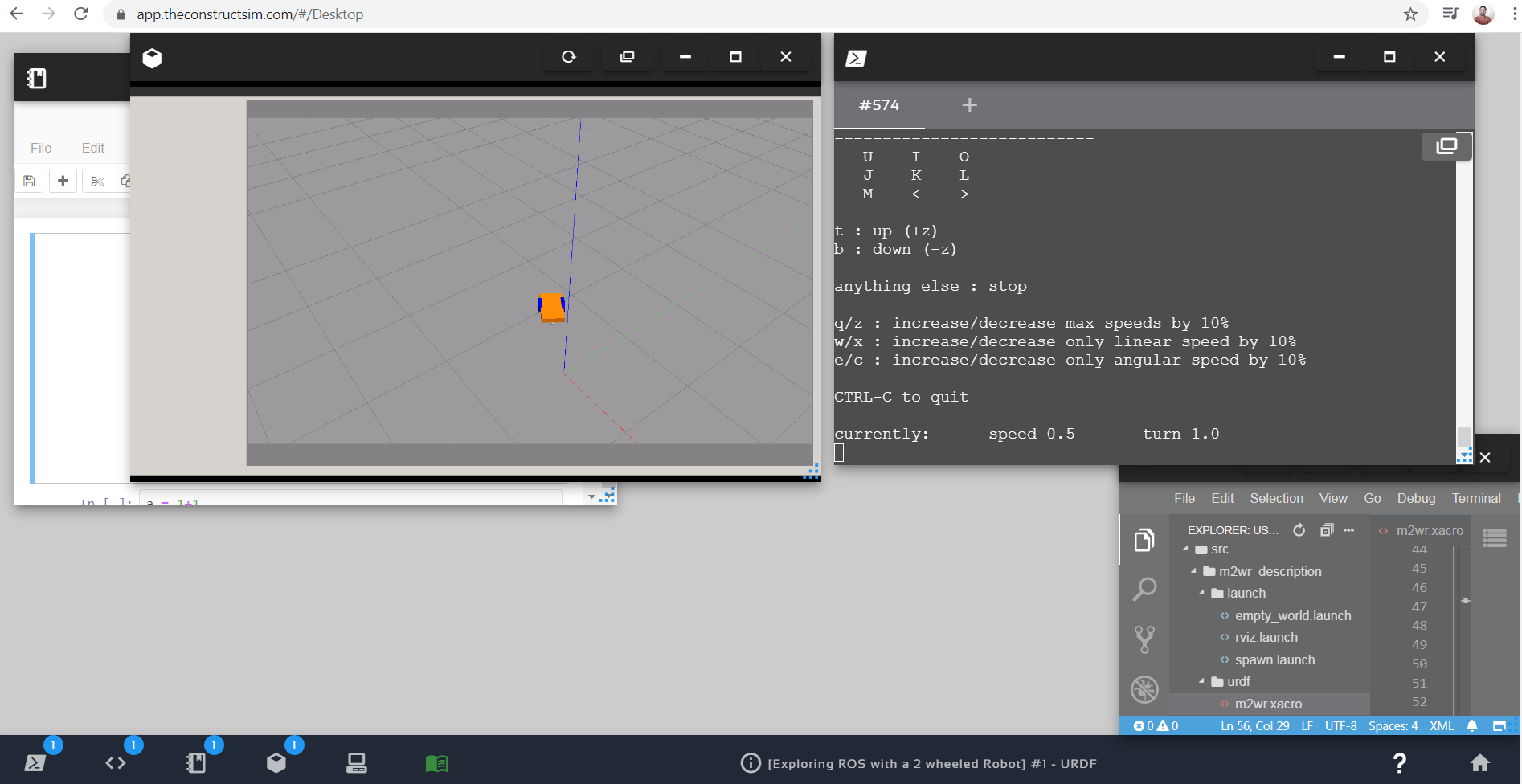
I have followed tutorial but in final stage i am not able to control my model through keyboard can anyone help please?
Hello:
try typing
rostopic info /cmd_vel
to verify you publishing the topic with your teleop node and subscribing it with gazebo
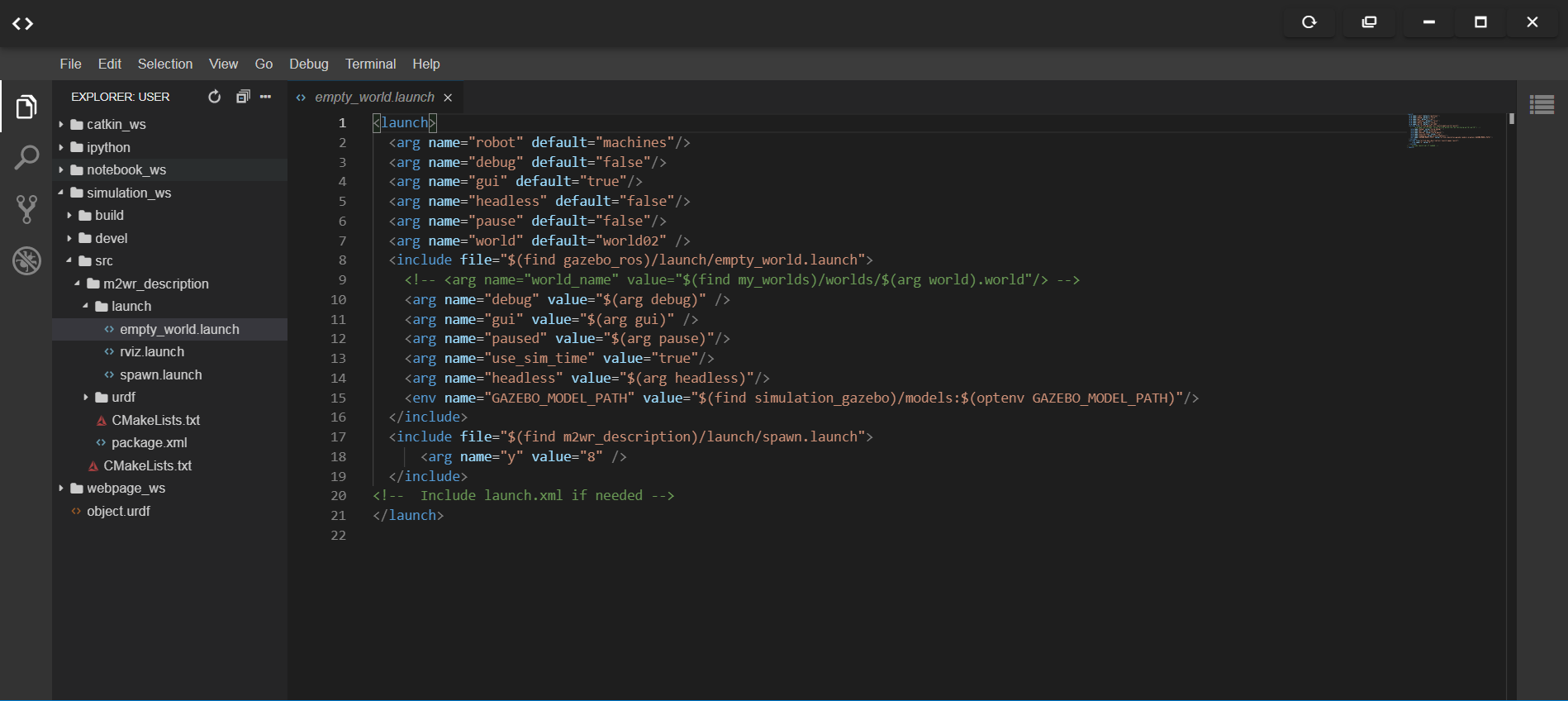
Important: you should include the differential_drive_controller.so in your urdf as a gazebo plugin with the tag topic
" /cmd_vel "
also try:
rostopic list
to list all the topics and verify the /cmd_vel topic does not have a different name
Bests
After spawn.launch command it is not working so I used empty world file still it is giving error can you please help me out here?
Hi @manishp ,
Could you check your rostopic list?
It is important for me to know what ROS distro you are working with, as well
Regards