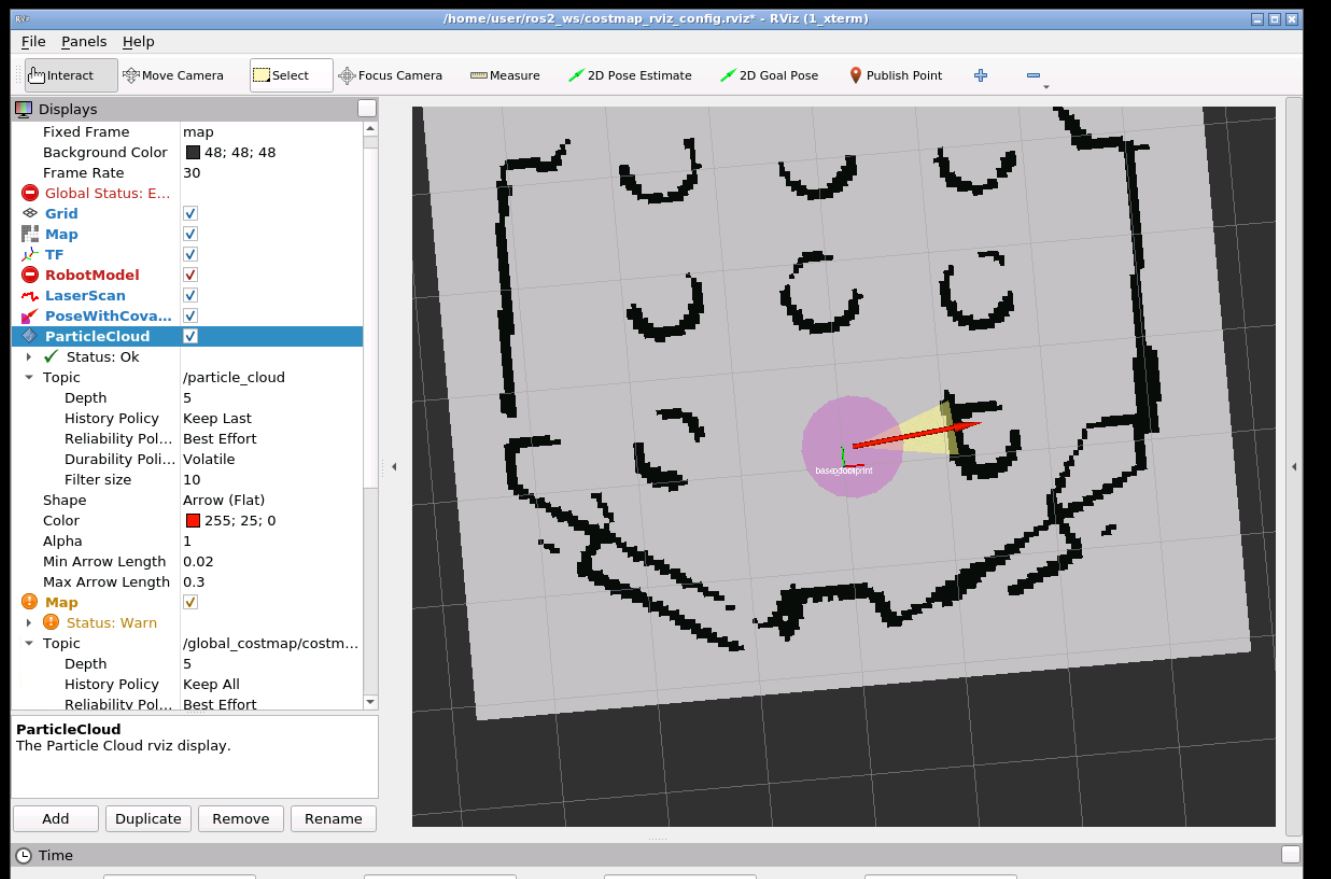
I can see the particles for objects but not the particles involved with localisation
Is this correct or have I done something wrong. Because it doesn’t look the same in the notebook photos
I can see the particles for objects but not the particles involved with localisation
Hello @oei.nick ,
You should see the particles for localization, yes. Review the QoS setting for your ParticleCloud display and make sure they are correct.
Hello @oei.nick ,
Have you set the robot’s initial pose using the 2D Pose Estimate tool in RViz? I can see in your picture you have an error in the Global Status, which suggests to me you have not done that.
I have been getting this error throughout the whole course
I have not figured out how to fix this error I thought it was fine since my map gets produced.
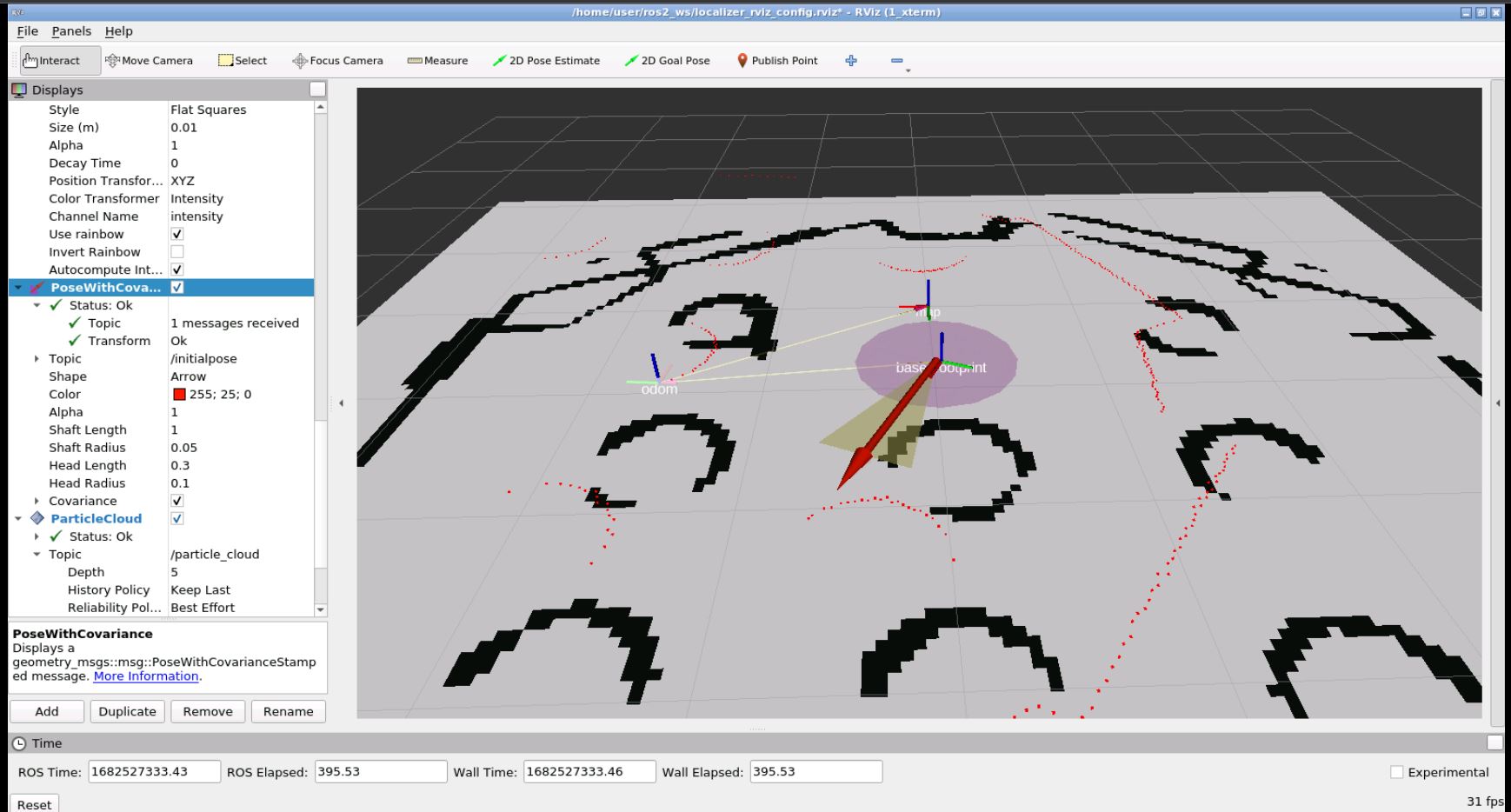
I have set the 2D pose estimate using RVIZ and even using the console.
I have also initialised map server^
Hello @oei.nick ,
Could you maybe record a short video of the process you are following? Or describe here step by step what are you doing?
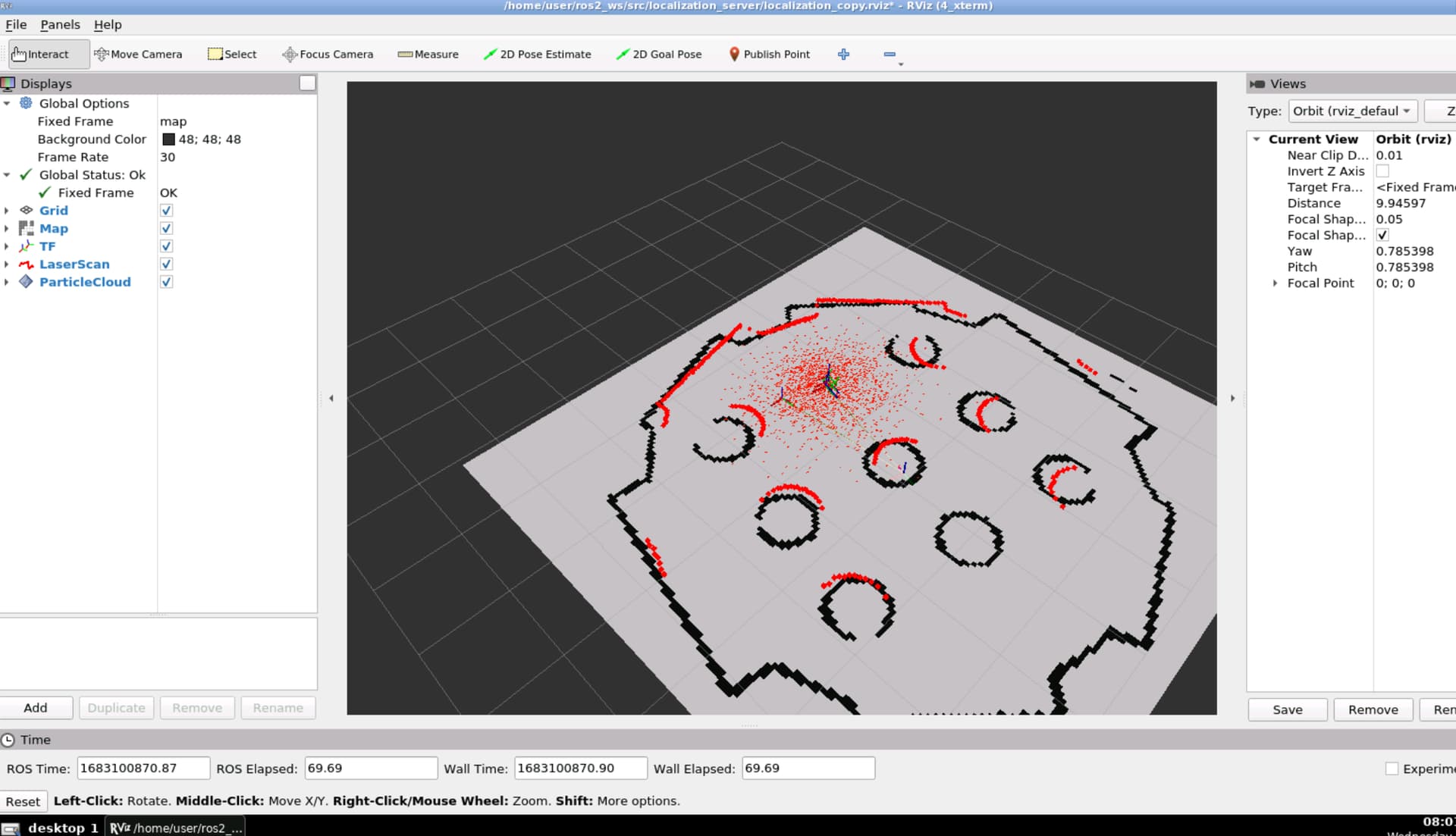
I’ve just tested it again and I can confirm that’s it should be working correctly. What I do is the following:
Hi bro I’ve fixed it. Thanks for your help
This topic was automatically closed 3 days after the last reply. New replies are no longer allowed.