Hello Everyone,i am trying to implement rosject of live class 67 (Multiple Robot Exploration). Most of the rosject is working fine but there is problem with “odom” topic and frame. Kobukis robots are not publishing any “odom” topic and there is no “odom” frame due to which gmapping doesn’t build map as it requires odom frame. we need Odom frame because it is the only connection between map frame and base_footprint or base_link. kindly have a look at the attached pictures for more clarification. Please must reply anyone who can guide me, Thankyou
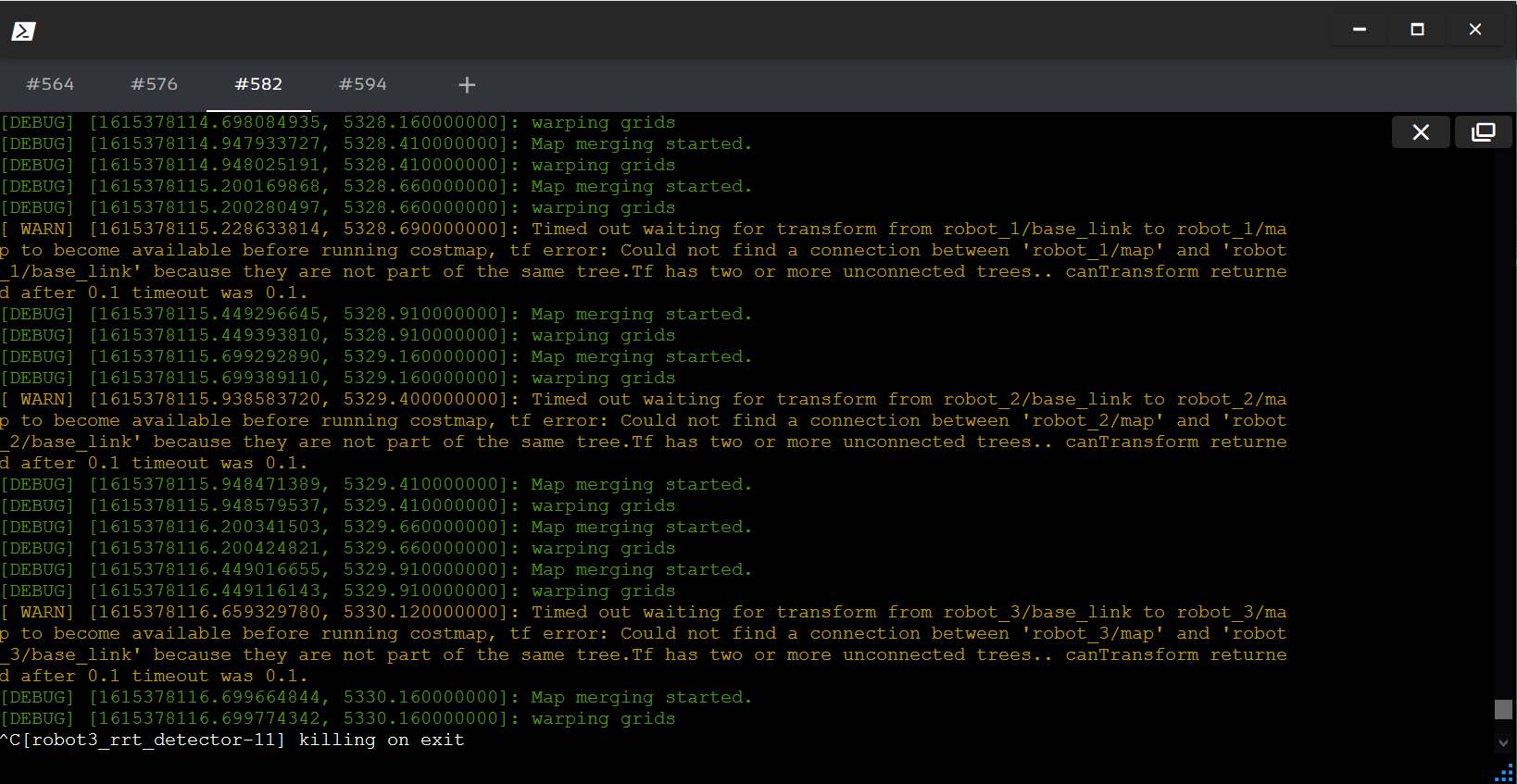
tf_tree split in 2 images

