Hey, I get an error
“NameError: name ‘xrange’ is not defined
[viz_osm-2] process has died [pid 7351, exit code 1, cmd /home/user/catkin_ws/src/open_street_map/osm_cartography/scripts/viz_osm name:=viz_osm log:=/home/user/.ros/log/972a20e6-634d-11ee-8c9e-0242c0a86006/viz_osm-2.log].
log file: /home/user/.ros/log/972a20e6-634d-11ee-8c9e-0242c0a86006/viz_osm-2*.log”
It seems that ros is using different version of the python. How do you fix this?
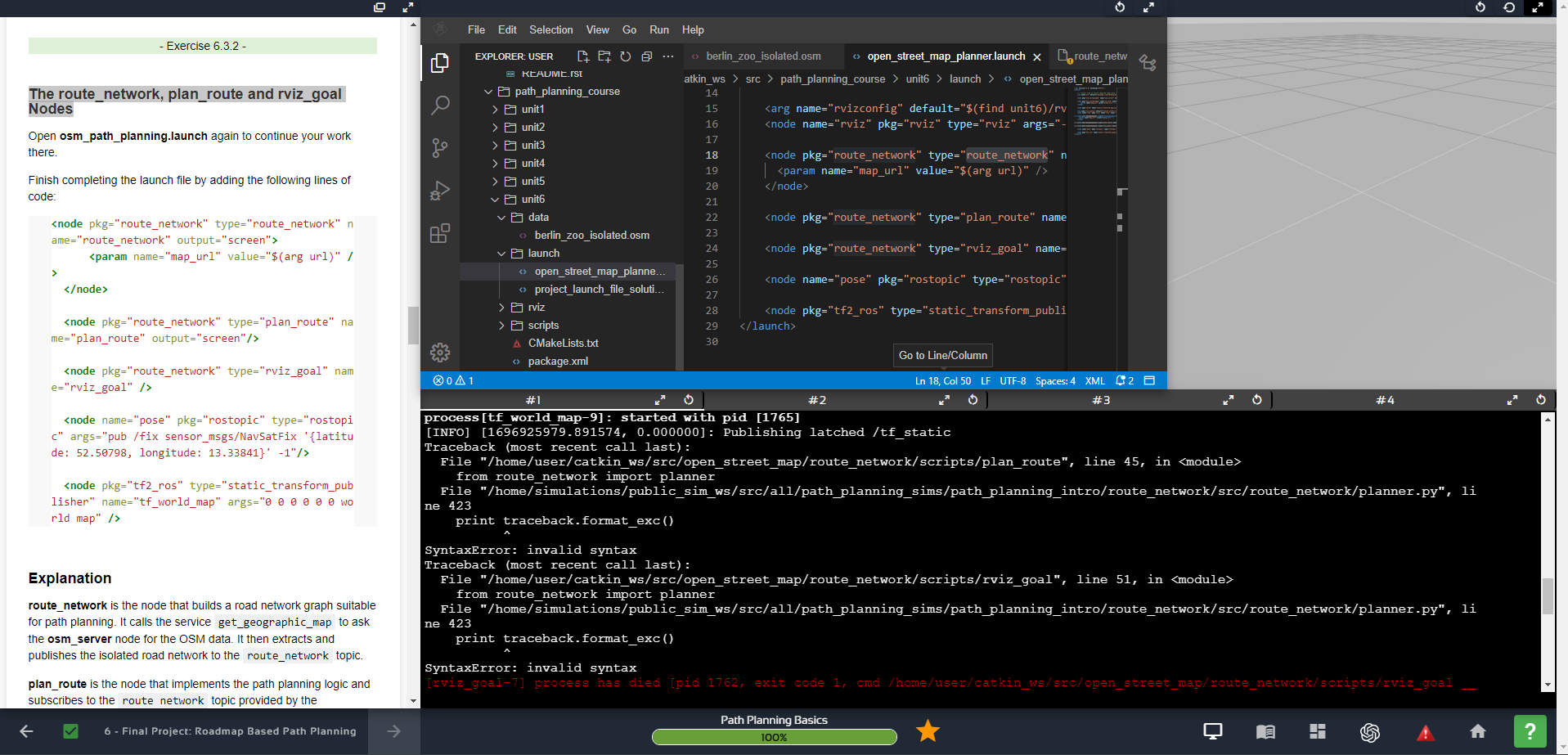
Please provide more details. When did you get that error? Which unit were you working on? Include a screenshot of the whole screen, and any other information that may help us find the error
In any case, the problem is that xrange is a keyword of Python2 and the course was migrated to Python3. We have now corrected the course to not use xrange anymore and use range instead (the Python3 equivalent)
The project was recently migrated to ROS Noetic, and as a result, some of the packages required updates.
All the code has now been updated to Python 3. Kindly review the beginning of the project instructions, where we’ve introduced a new step. This involves cloning a repository from Bitbucket into ~/catkin_ws/src. After building and sourcing, the error you encountered should be resolved.
Kindly inform us whether the issue has been resolved.