Hi support,
after opened movit, I try to load quadrotor_sensors.urdf.xacro located in the cvg_sim_gazebo/urdf package but movit replies with

thanks for your help
best
Salvatore
Hi support,
after opened movit, I try to load quadrotor_sensors.urdf.xacro located in the cvg_sim_gazebo/urdf package but movit replies with
Hi @saxosun ,
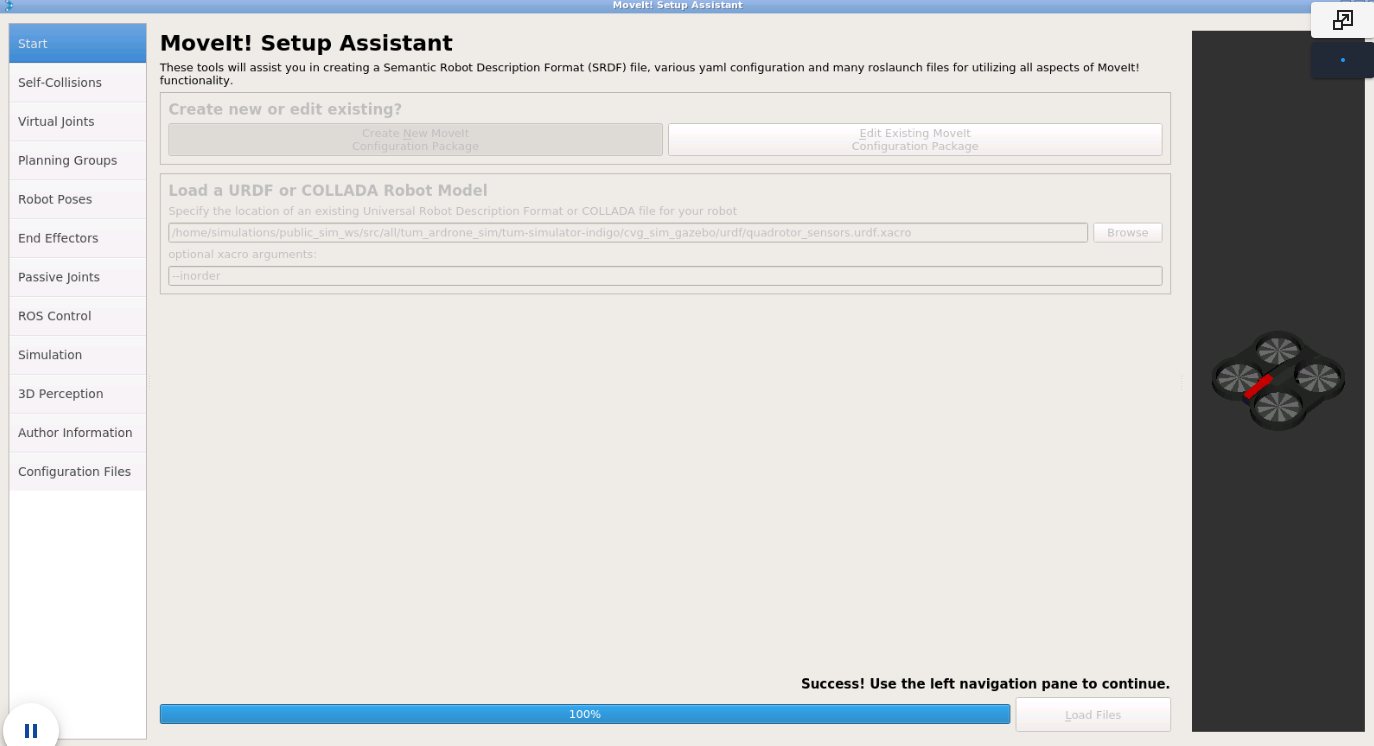
There is a minor mistake, that is the chosing the right package. Instead of cvg_sim_gazebo_plugins, chose cvg_sim_gazebo
That one should get you the expected result with moveit, like below:
Please, let me know if that works for you
Regards
Hi Marco,
thanks very much, it works!
Regards
Salvatore