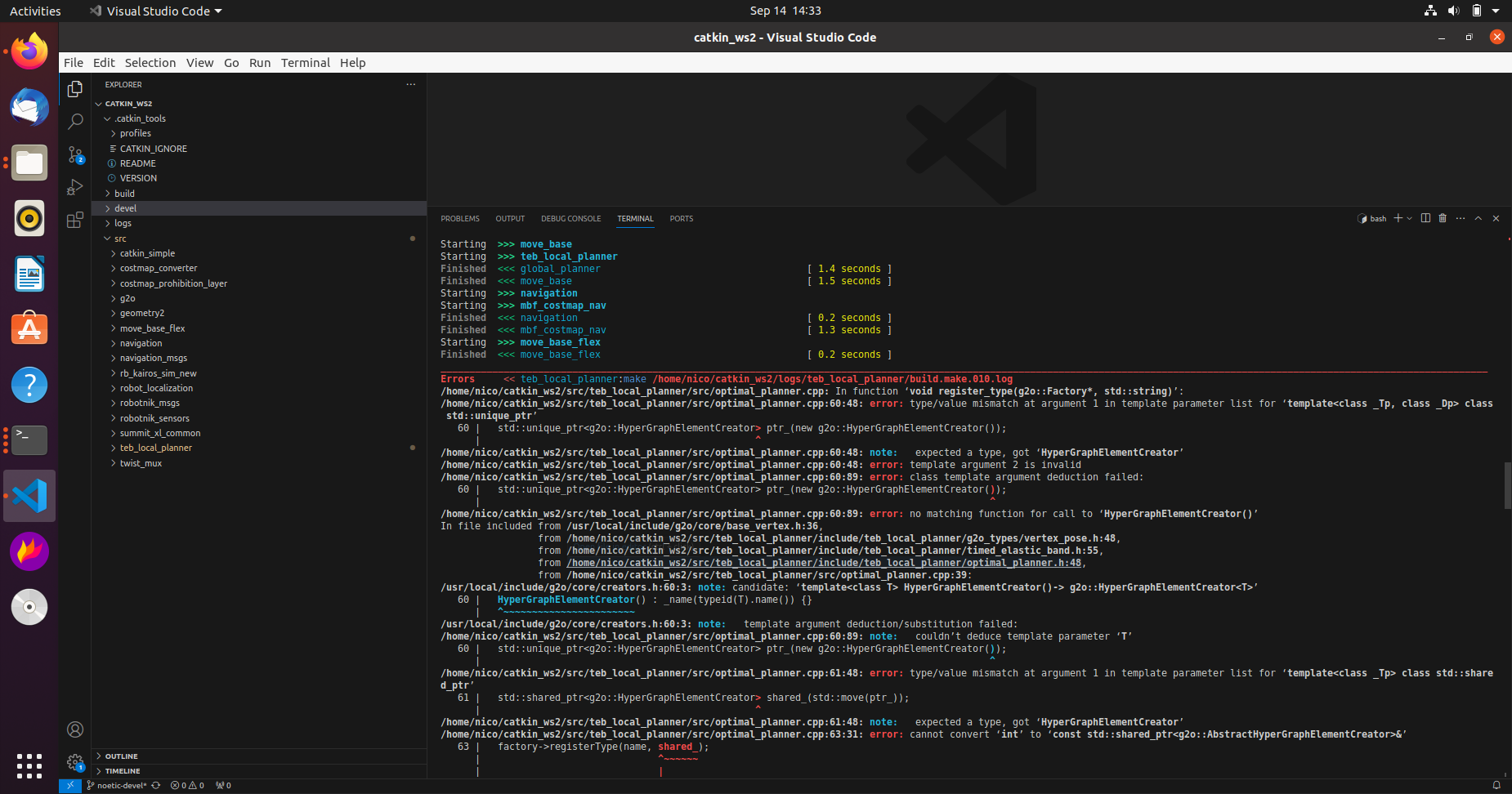
**Tried building teb_local_planner in all 3 branches and it always ends up givin…g these errors in common:**
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp: In static member function ‘static void teb_local_planner::TebOptimalPlanner::registerG2OTypes()’:
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:126:40: **error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::VertexPose>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&**’
126 | factory->registerType("VERTEX_POSE", new g2o::HyperGraphElementCreator<VertexPose>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::VertexPose>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:127:44: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::VertexTimeDiff>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
127 | factory->registerType("VERTEX_TIMEDIFF", new g2o::HyperGraphElementCreator<VertexTimeDiff>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::VertexTimeDiff>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:129:46: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeTimeOptimal>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
129 | factory->registerType("EDGE_TIME_OPTIMAL", new g2o::HyperGraphElementCreator<EdgeTimeOptimal>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeTimeOptimal>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:130:47: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeShortestPath>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
130 | factory->registerType("EDGE_SHORTEST_PATH", new g2o::HyperGraphElementCreator<EdgeShortestPath>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeShortestPath>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:131:42: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeVelocity>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
131 | factory->registerType("EDGE_VELOCITY", new g2o::HyperGraphElementCreator<EdgeVelocity>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeVelocity>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:132:52: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeVelocityHolonomic>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
132 | factory->registerType("EDGE_VELOCITY_HOLONOMIC", new g2o::HyperGraphElementCreator<EdgeVelocityHolonomic>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeVelocityHolonomic>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:133:46: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAcceleration>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
133 | factory->registerType("EDGE_ACCELERATION", new g2o::HyperGraphElementCreator<EdgeAcceleration>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAcceleration>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:134:52: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationStart>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
134 | factory->registerType("EDGE_ACCELERATION_START", new g2o::HyperGraphElementCreator<EdgeAccelerationStart>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationStart>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:135:51: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationGoal>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
135 | factory->registerType("EDGE_ACCELERATION_GOAL", new g2o::HyperGraphElementCreator<EdgeAccelerationGoal>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationGoal>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:136:56: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomic>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
136 | factory->registerType("EDGE_ACCELERATION_HOLONOMIC", new g2o::HyperGraphElementCreator<EdgeAccelerationHolonomic>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomic>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:137:62: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomicStart>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
137 | factory->registerType("EDGE_ACCELERATION_HOLONOMIC_START", new g2o::HyperGraphElementCreator<EdgeAccelerationHolonomicStart>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomicStart>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:138:61: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomicGoal>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
138 | factory->registerType("EDGE_ACCELERATION_HOLONOMIC_GOAL", new g2o::HyperGraphElementCreator<EdgeAccelerationHolonomicGoal>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeAccelerationHolonomicGoal>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:139:55: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeKinematicsDiffDrive>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
139 | factory->registerType("EDGE_KINEMATICS_DIFF_DRIVE", new g2o::HyperGraphElementCreator<EdgeKinematicsDiffDrive>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeKinematicsDiffDrive>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:140:52: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeKinematicsCarlike>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
140 | factory->registerType("EDGE_KINEMATICS_CARLIKE", new g2o::HyperGraphElementCreator<EdgeKinematicsCarlike>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeKinematicsCarlike>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:141:42: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeObstacle>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
141 | factory->registerType("EDGE_OBSTACLE", new g2o::HyperGraphElementCreator<EdgeObstacle>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeObstacle>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:142:51: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeInflatedObstacle>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
142 | factory->registerType("EDGE_INFLATED_OBSTACLE", new g2o::HyperGraphElementCreator<EdgeInflatedObstacle>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeInflatedObstacle>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:143:50: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeDynamicObstacle>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
143 | factory->registerType("EDGE_DYNAMIC_OBSTACLE", new g2o::HyperGraphElementCreator<EdgeDynamicObstacle>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeDynamicObstacle>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:144:43: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgeViaPoint>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
144 | factory->registerType("EDGE_VIA_POINT", new g2o::HyperGraphElementCreator<EdgeViaPoint>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgeViaPoint>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
/home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:145:47: error: cannot convert ‘g2o::HyperGraphElementCreator<teb_local_planner::EdgePreferRotDir>*’ to ‘const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&’
145 | factory->registerType("EDGE_PREFER_ROTDIR", new g2o::HyperGraphElementCreator<EdgePreferRotDir>);
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
| |
| g2o::HyperGraphElementCreator<teb_local_planner::EdgePreferRotDir>*
In file included from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/include/teb_local_planner/optimal_planner.h:56,
from /home/saad/navigation2_ws/src/navigation2/teb_local_planner/teb_local_planner/src/optimal_planner.cpp:42:
/usr/local/include/g2o/core/factory.h:63:78: note: initializing argument 2 of ‘void g2o::Factory::registerType(const string&, const std::shared_ptr<g2o::AbstractHyperGraphElementCreator>&)’
63 | const std::shared_ptr<AbstractHyperGraphElementCreator>& c);
| ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^
make[2]: *** [CMakeFiles/teb_local_planner.dir/build.make:63: CMakeFiles/teb_local_planner.dir/src/timed_elastic_band.cpp.o] Error 1
make[2]: *** [CMakeFiles/teb_local_planner.dir/build.make:102: CMakeFiles/teb_local_planner.dir/src/visualization.cpp.o] Error 1
make[2]: *** [CMakeFiles/teb_local_planner.dir/build.make:141: CMakeFiles/teb_local_planner.dir/src/homotopy_class_planner.cpp.o] Error 1
make[2]: *** [CMakeFiles/teb_local_planner.dir/build.make:76: CMakeFiles/teb_local_planner.dir/src/optimal_planner.cpp.o] Error 1
make[1]: *** [CMakeFiles/Makefile2:78: CMakeFiles/teb_local_planner.dir/all] Error 2
make: *** [Makefile:141: all] Error 2