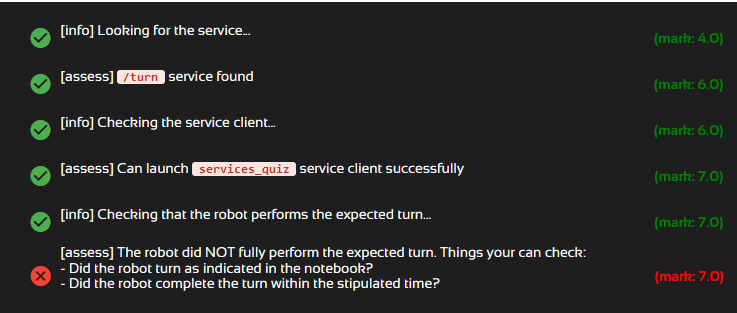
Hello, I passed almost all the checkpoints. My testing environment shows that the robot was able to turn with specified direction, angular_velocity, and time.
Here’s my client side:
def send_request(self):
print(sys.argv)
# send the request
self.req.direction = sys.argv[1]
self.req.angular_velocity = float(sys.argv[2])
self.req.time = int(sys.argv[3])
# uses sys.argv to access command line input arguments for the request.
self.future = self.client.call_async(self.req)
# to print in the console
My shell command is as follow:
ros2 run services_quiz services_quiz_client right 5.0 10
my server side is:
def custom_service_callback(self, request, response):
# The callback function receives the self-class parameter,
# received along with two parameters called request and response
# - receive the data by request
# - return a result as a response
# create a Twist message
msg = Twist()
if request.direction == "right":
# define the linear x-axis velocity of /cmd_vel topic parameter to 0.1
# msg.linear.x = 0.1
# define the angular z-axis velocity of /cmd_vel topic parameter to -0.5 to turn right
msg.angular.z = -(request.angular_velocity)
# Publish the message to the topic
self.publisher_.publish(msg)
# print a pretty message
self.get_logger().info('Turning to right direction!!')
# response state
start_time = time.time()
while(time.time() - start_time < request.time):
pass
msg.angular.z = 0.0
self.publisher_.publish(msg)
response.success = True
elif request.direction == "left":
# define the linear x-axis velocity of /cmd_vel topic parameter to 0.1
# msg.linear.x = 0.1
# define the angular z-axis velocity of /cmd_vel topic parameter to 0.5 to turn left
msg.angular.z = request.angular_velocity
# Publish the message to the topic
self.publisher_.publish(msg)
# print a pretty message
self.get_logger().info('Turning to left direction!!')
# response state
start_time = time.time()
while(time.time() - start_time < request.time):
# print(time.time() - start_time, request.time)
pass
msg.angular.z = 0.0
self.publisher_.publish(msg)
response.success = True
# elif request.move == "Stop":
# # define the linear x-axis velocity of /cmd_vel topic parameter to 0
# msg.linear.x = 0.0
# # define the angular z-axis velocity of /cmd_vel topic parameter to 0
# msg.angular.z = 0.0
# # Publish the message to the topic
# self.publisher_.publish(msg)
# # print a pretty message
# self.get_logger().info('Stop there!!')
# # response state
# response.success = True
else:
# response state
response.success = False
# return the response parameter
return response
I did import python time module to keep track of how many seconds, not sure if this is the desired way.
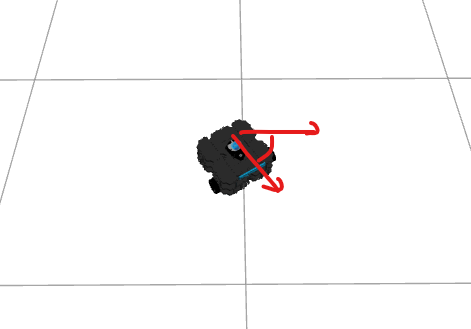
with the command ros2 run services_quiz services_quiz_client right 0.2 10
I get less than 90 degree-ish
======= update ======
Got a little closer, but still unable to pass the 7 marker
Using time with self.get_clock().now().seconds_nanoseconds()[0]
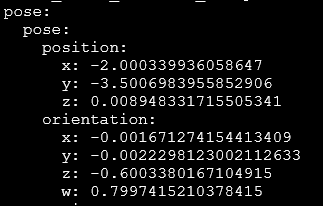
I noticed the robot will move slightly over time even though the Response state (client) has ended, carried by some momentum (the change is very small)