Hi Team,
The RB-Kairos simulation in this course is using UR10.
Instead that, I want to use UR5. For that, Where I need to change URDF file?
Because when I changed here, error occured.
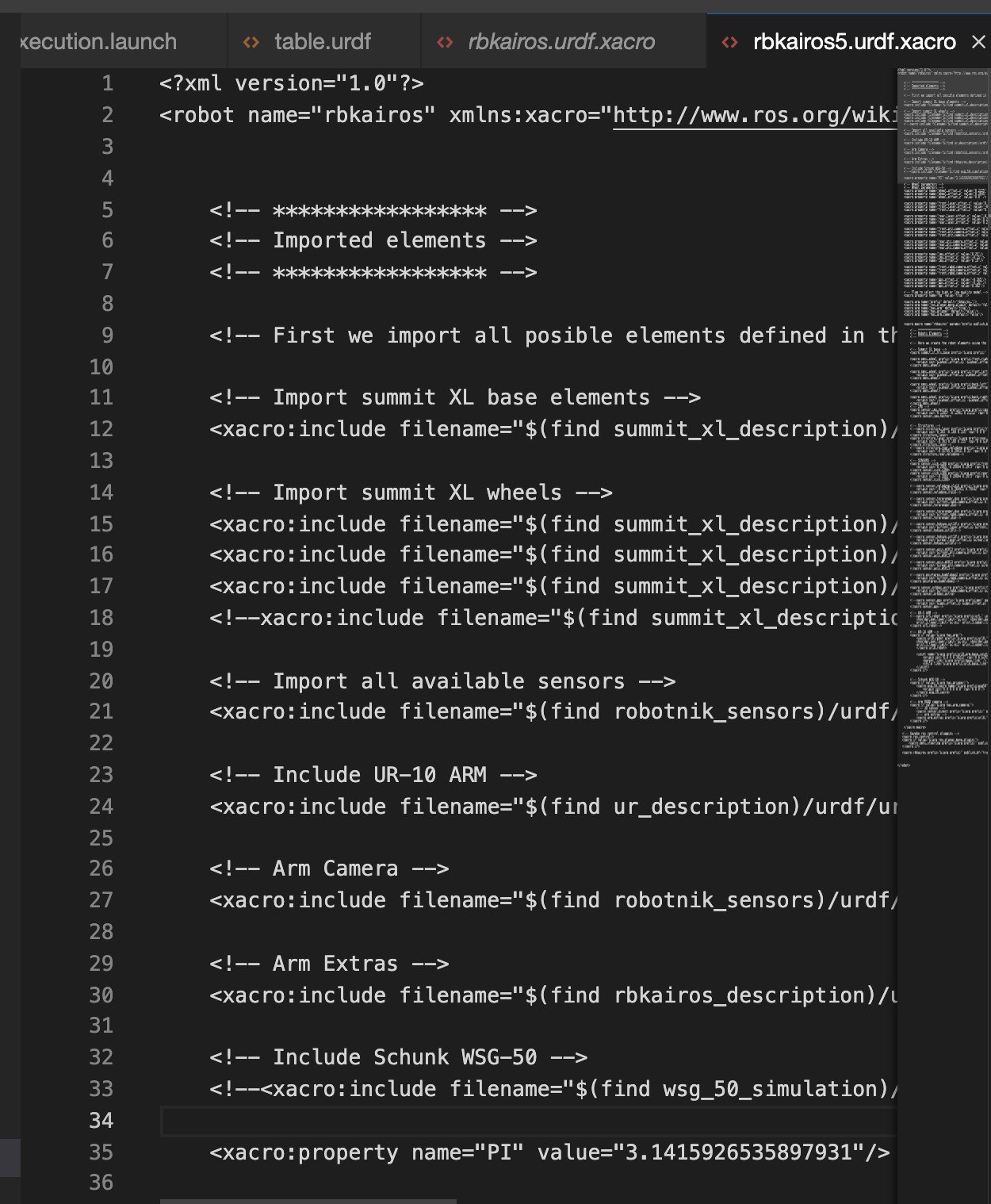
In that line you are showing, you are just including a URDF file. However, you will need to make more modifications in the URDF file in order to adapt it to another UR arm. For instance, you can see here how the UR10 arm is being defined. You will need to find all the references to the UR10 arm in the URDF files, and modify them in order to adapt them for the UR5 robot.