Hello @reiko.iwamoto ,
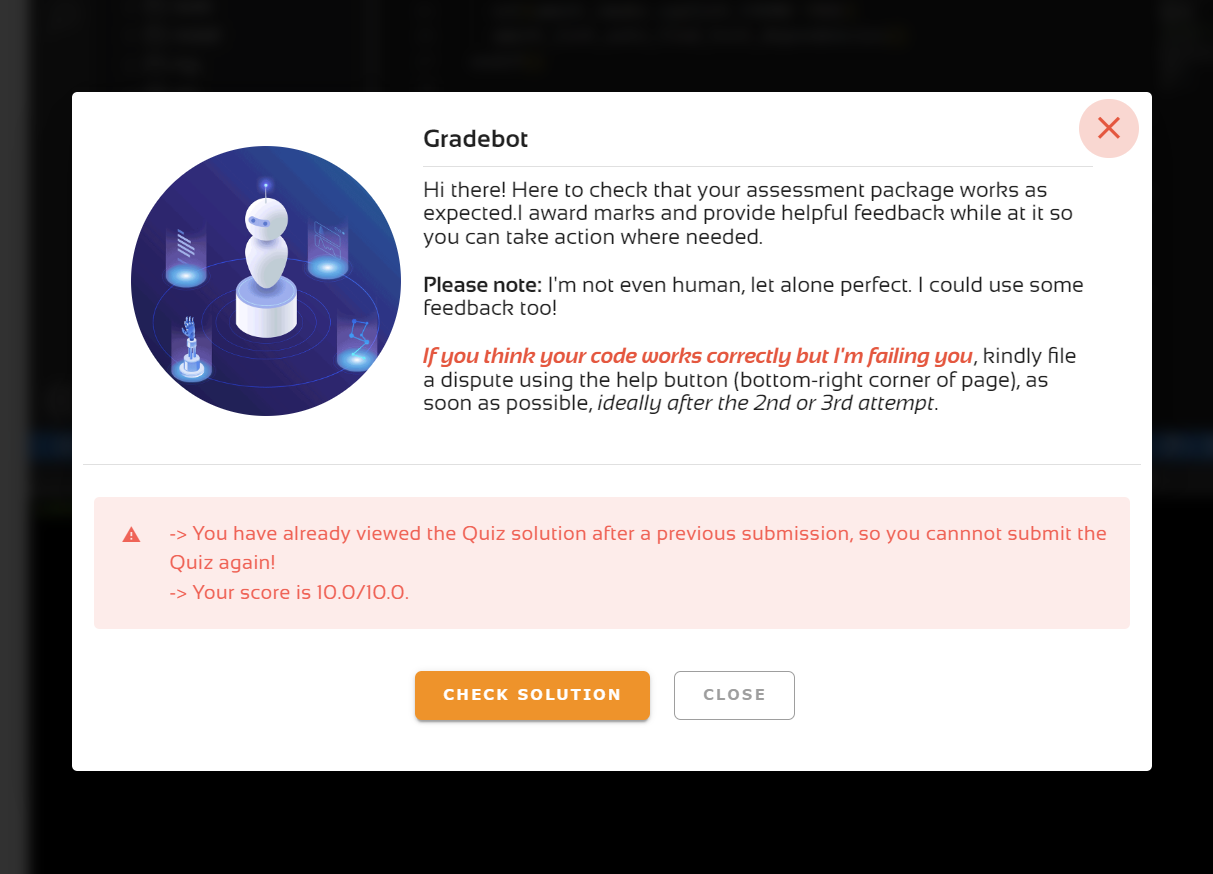
The solution to this Quiz is now available.
Best,
Hi @albertoezquerro ,
I checked and it doesn’t seem to be set up yet?
And just realized why my score shows 0.0/10.0 here in unit6?
Unit3 submit below
.
@reiko.iwamoto
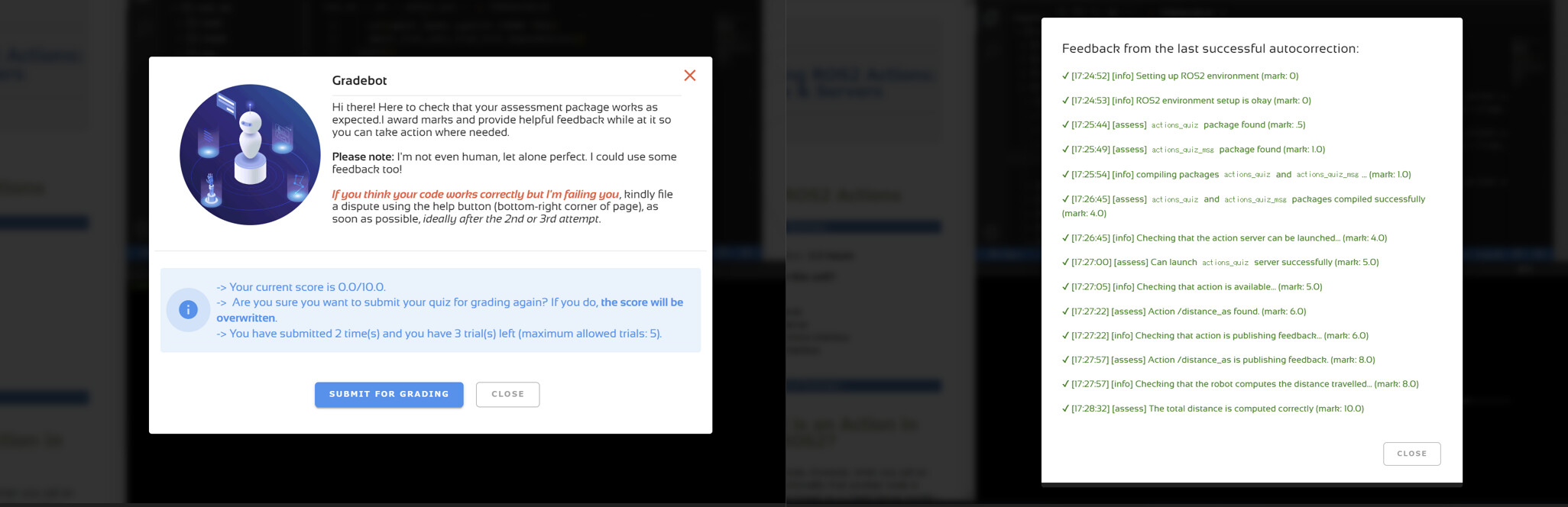
You only see this if any of these three conditions are met:
You had a score of 10.0 in the last attempt, or
You have used up your trials, or
You have viewed the solution in a previous attempt.
You are not able to see it because your last score was zero. From the logs, it is obvious that it was an attempt that was probably mistakenly started and was then aborted.
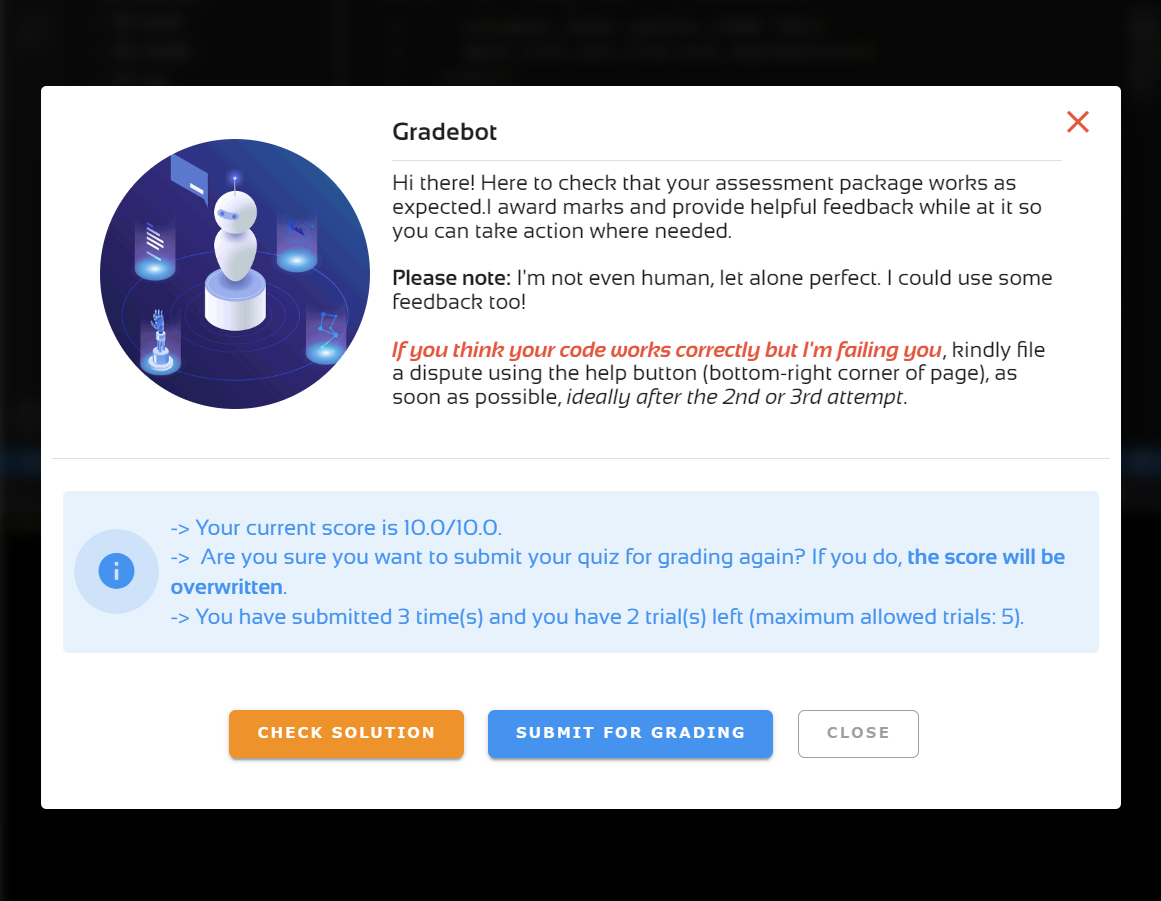
To see the solution, please submit again. I have assigned you one more trial to make up for this.
Since your solution already worked in a previous attempt, I expect that you would just sit back and sip a coffee while the grader does its magic to revalidate your code.
Hi @bayodesegun ,
I had checked everything worked ok before submitting
user:~$ ros2 action send_goal -f /distance_as actions_quiz_msg/action/Distance "{seconds: 20}"
Waiting for an action server to become available...
Sending goal:
seconds: 20
Goal accepted with ID: d6b417995e4e43e39479df275e471913
Feedback:
current_dist: 0.29849863052368164
Feedback:
current_dist: 0.5969972610473633
Feedback:
current_dist: 0.8954958915710449
Feedback:
current_dist: 1.1939949989318848
Feedback:
current_dist: 1.4924936294555664
Feedback:
current_dist: 1.790992259979248
Feedback:
current_dist: 2.0894908905029297
Feedback:
current_dist: 2.3879897594451904
Feedback:
current_dist: 2.686488628387451
Feedback:
current_dist: 2.984987258911133
Feedback:
current_dist: 3.2834861278533936
Feedback:
current_dist: 3.581984758377075
Feedback:
current_dist: 3.880483627319336
Feedback:
current_dist: 4.178982257843018
Feedback:
current_dist: 4.477480888366699
Feedback:
current_dist: 4.775979995727539
Feedback:
current_dist: 5.074478626251221
Feedback:
current_dist: 5.372977256774902
Feedback:
current_dist: 5.671475887298584
Feedback:
current_dist: 5.969974517822266
Result:
status: true
total_dist: 6.2684736251831055
Goal finished with status: SUCCEEDED
user:~$
And here is the Action SERVER
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_server.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-02-27-11-06-46-470123-1_xterm-4780
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_server_node-1]: process started with pid [4781]
[actions_quiz_server_node-1] [INFO] [1709032019.362689015] [actions_quiz_server]: Received goal request: 20
[actions_quiz_server_node-1] [INFO] [1709032019.363170910] [actions_quiz_server]: Executing goal
[actions_quiz_server_node-1] [INFO] [1709032020.363419970] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032021.363476386] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032022.363454455] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032023.363465147] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032024.363433452] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032025.363448660] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032026.363450567] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032027.363462138] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032028.363467991] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032029.363495255] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032030.363472568] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032031.363425162] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032032.363551659] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032033.363419327] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032034.363457942] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032035.363476737] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032036.363509084] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032037.363455172] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032038.363473059] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032039.363446333] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709032040.363498757] [actions_quiz_server]: Goal succeeded
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[actions_quiz_server_node-1] [INFO] [1709032052.879561595] [rclcpp]: signal_handler(signum=2)
[INFO] [actions_quiz_server_node-1]: process has finished cleanly [pid 4781]
user:~/ros2_ws$
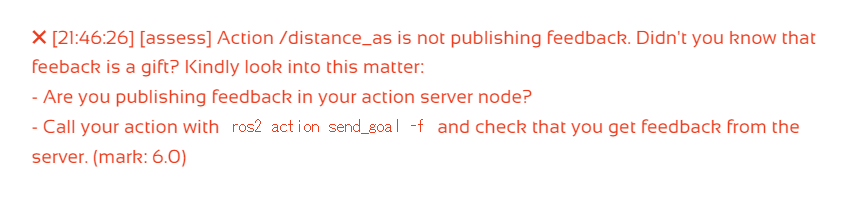
I don’t see any reason why it should not pass…I have included some traps in the code to detect any error.
Could you please submit again?
Hi, @bayodesegun
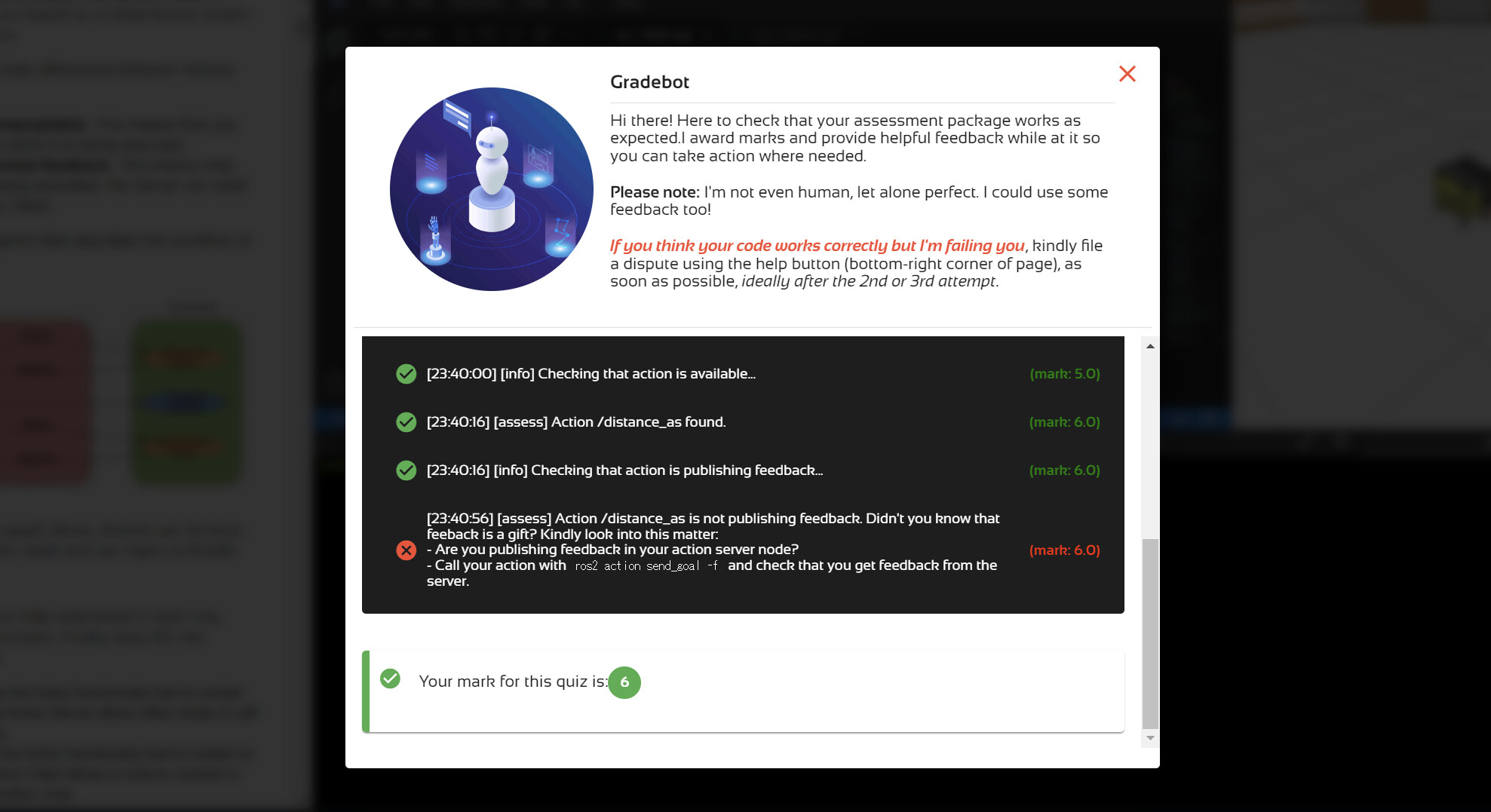
I also do not understand why this happnes again.Gradebot ?
.
.
The following is the latest test result for your information:
Action SERVER:
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_server.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-02-28-23-34-21-184977-2_xterm-3592
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_server_node-1]: process started with pid [3593]
[actions_quiz_server_node-1] [INFO] [1709163265.602264511] [actions_quiz_server]: Received goal request: 20
[actions_quiz_server_node-1] [INFO] [1709163265.602664500] [actions_quiz_server]: Executing goal
[actions_quiz_server_node-1] [INFO] [1709163266.602985657] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163267.602999307] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163268.602979299] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163269.607933954] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163270.603014795] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163271.603070796] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163272.603011780] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163273.603032855] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163274.603016040] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163275.603015346] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163276.603022118] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163277.603042156] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163278.603024276] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163279.603030874] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163280.603000234] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163281.603358893] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163282.603005856] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163283.602997355] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163284.603027795] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163285.603350394] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709163286.603151820] [actions_quiz_server]: Goal succeeded
.
user:~/ros2_ws$ ros2 action send_goal -f /distance_as actions_quiz_msg/action/Distance "{seconds: 20}"
Waiting for an action server to become available...
Sending goal:
seconds: 20
Goal accepted with ID: b030c2a8b17e44dc827ad14dced13d35
Feedback:
current_dist: 0.19584941864013672
Feedback:
current_dist: 0.3897590637207031
Feedback:
current_dist: 0.5817298889160156
Feedback:
current_dist: 0.775639533996582
Feedback:
current_dist: 0.9695496559143066
Feedback:
current_dist: 1.163459300994873
Feedback:
current_dist: 1.3573694229125977
Feedback:
current_dist: 1.5512795448303223
Feedback:
current_dist: 1.7451891899108887
Feedback:
current_dist: 1.9390993118286133
Feedback:
current_dist: 2.1330089569091797
Feedback:
current_dist: 2.326918840408325
Feedback:
current_dist: 2.5208287239074707
Feedback:
current_dist: 2.714738607406616
Feedback:
current_dist: 2.9086484909057617
Feedback:
current_dist: 3.1025583744049072
Feedback:
current_dist: 3.2964682579040527
Feedback:
current_dist: 3.4903781414031982
Feedback:
current_dist: 3.6842880249023438
Feedback:
current_dist: 3.8781979084014893
Result:
status: true
total_dist: 4.072107791900635
Goal finished with status: SUCCEEDED
user:~/ros2_ws$
.
user:~$ ros2 topic echo /total_distance
data: 0.9695496559143066
---
data: 1.163459300994873
---
data: 1.3573694229125977
---
data: 1.5512795448303223
---
data: 1.7451891899108887
---
data: 1.9390993118286133
---
data: 2.1330089569091797
---
data: 2.326918840408325
---
data: 2.5208287239074707
---
data: 2.714738607406616
---
data: 2.9086484909057617
---
data: 3.1025583744049072
---
data: 3.2964682579040527
---
data: 3.4903781414031982
---
data: 3.6842880249023438
---
data: 3.8781979084014893
---
data: 4.072107791900635
---
.
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_client.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-02-28-23-37-32-169500-2_xterm-4009
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_client_node-1]: process started with pid [4010]
[actions_quiz_client_node-1] [INFO] [1709163453.347723728] [actions_quiz_client]: Waiting for Action Server to become available...
[actions_quiz_client_node-1] [INFO] [1709163453.962936720] [actions_quiz_client]: Sending goal: seconds: 20
[actions_quiz_client_node-1] [INFO] [1709163454.033525591] [actions_quiz_client]: Goal accepted by server, waiting for result
[actions_quiz_client_node-1] [INFO] [1709163454.963917809] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.283643
[actions_quiz_client_node-1] [INFO] [1709163455.964026148] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.564450
[actions_quiz_client_node-1] [INFO] [1709163456.964096313] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.848093
[actions_quiz_client_node-1] [INFO] [1709163457.964001249] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.134573
[actions_quiz_client_node-1] [INFO] [1709163458.965214648] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.418216
[actions_quiz_client_node-1] [INFO] [1709163459.964173365] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.699023
[actions_quiz_client_node-1] [INFO] [1709163460.964060706] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.982666
[actions_quiz_client_node-1] [INFO] [1709163461.964014537] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.266309
[actions_quiz_client_node-1] [INFO] [1709163462.964090982] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.549952
[actions_quiz_client_node-1] [INFO] [1709163463.964137369] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.833595
[actions_quiz_client_node-1] [INFO] [1709163464.964414066] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 3.117239
[actions_quiz_client_node-1] [INFO] [1709163465.963982585] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 3.400882
[actions_quiz_client_node-1] [INFO] [1709163466.963996911] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 3.684525
[actions_quiz_client_node-1] [INFO] [1709163467.963984271] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 3.968168
[actions_quiz_client_node-1] [INFO] [1709163468.964745357] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 4.251811
[actions_quiz_client_node-1] [INFO] [1709163469.964724201] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 4.532618
[actions_quiz_client_node-1] [INFO] [1709163470.972409947] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 4.816261
[actions_quiz_client_node-1] [INFO] [1709163471.964033780] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 5.097068
[actions_quiz_client_node-1] [INFO] [1709163472.964061321] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 5.383548
[actions_quiz_client_node-1] [INFO] [1709163473.964004585] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 5.670027
[actions_quiz_client_node-1] [INFO] [1709163474.964637673] [actions_quiz_client]: Result received:
[actions_quiz_client_node-1] Status: true
[actions_quiz_client_node-1] Total Distance: 5.950834
[INFO] [actions_quiz_client_node-1]: process has finished cleanly [pid 4010]
user:~/ros2_ws$
Hi @bayodesegun ,
What i had tried to deal with this issue is
.
.
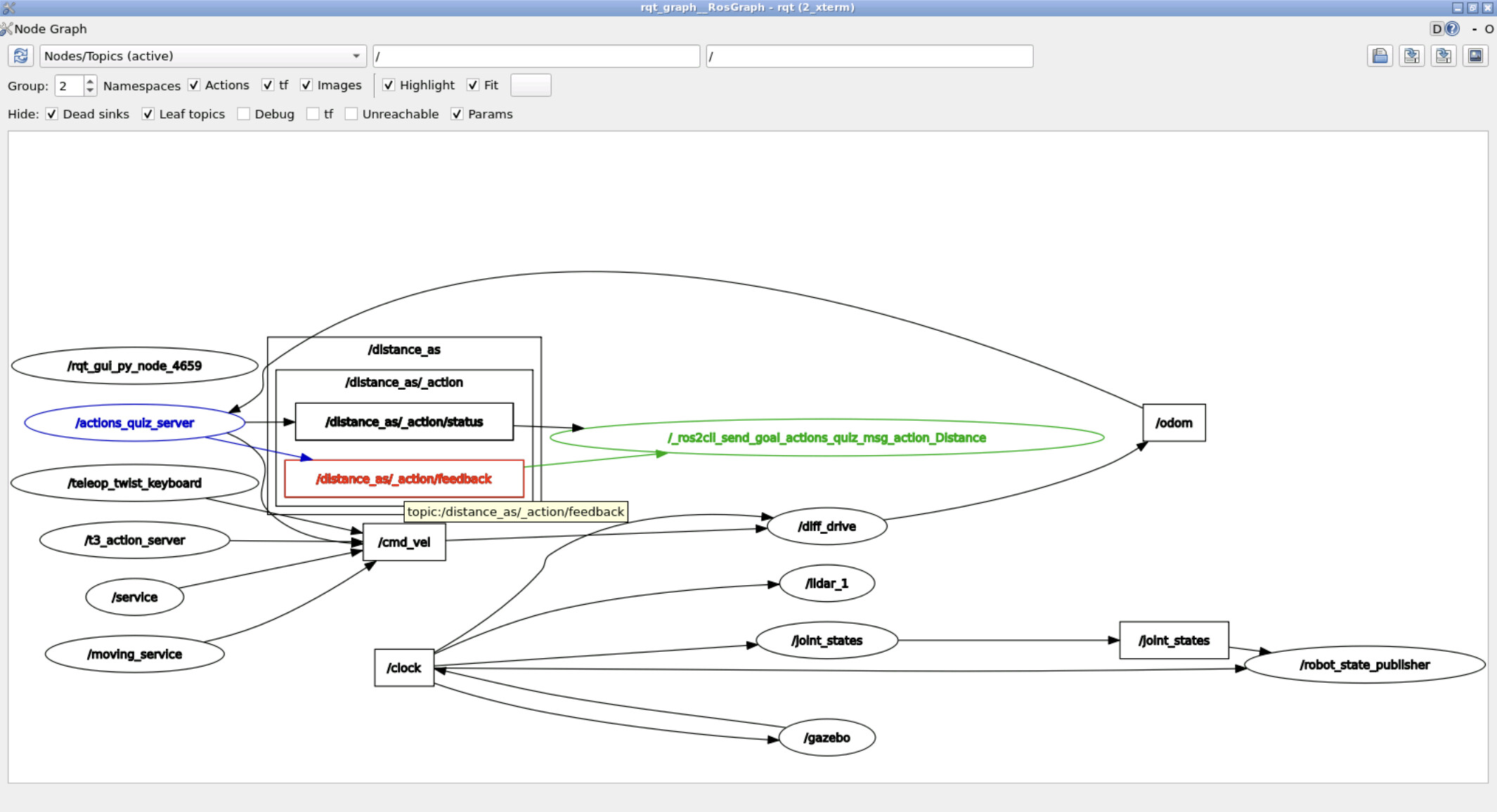
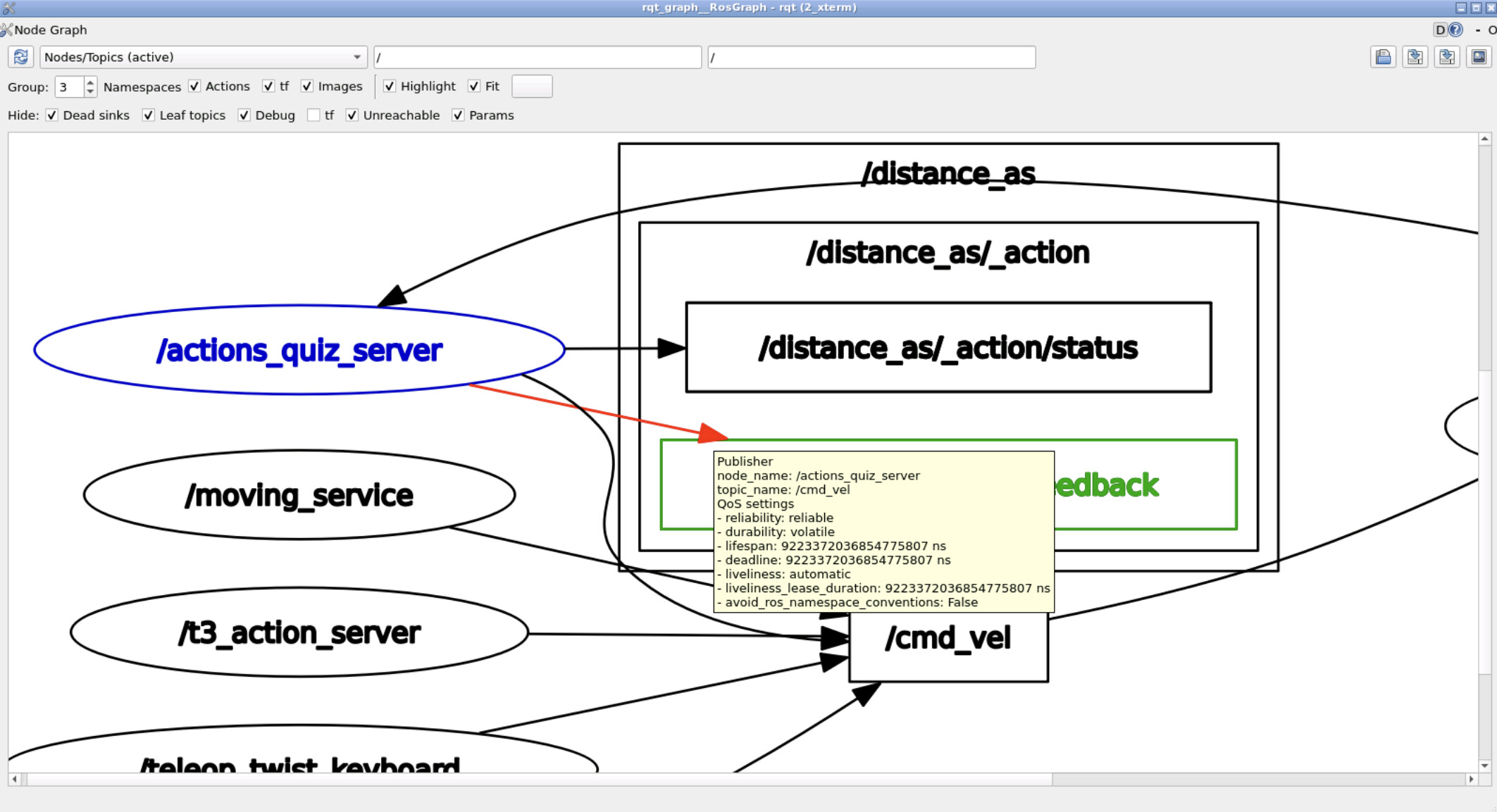
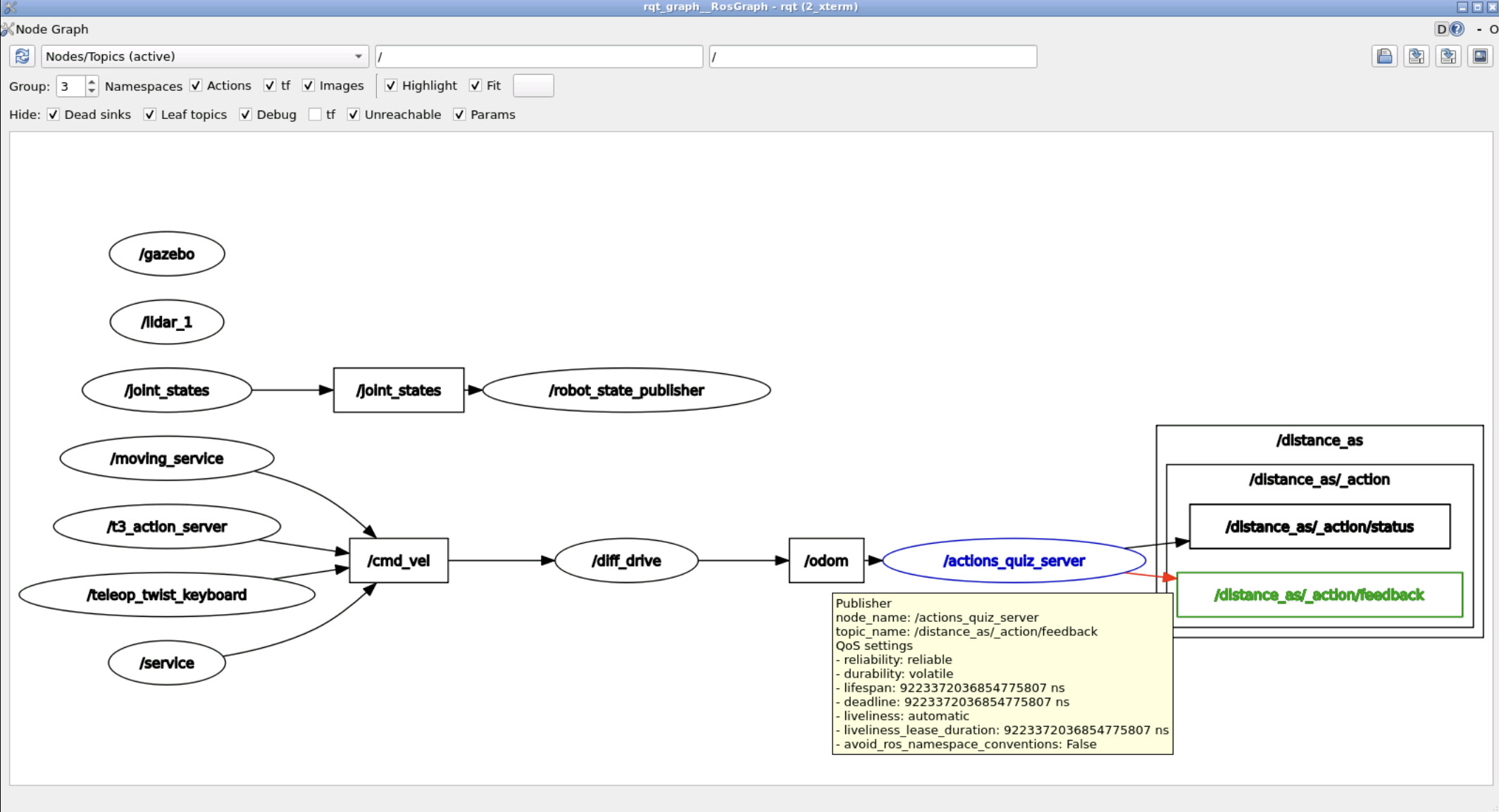
It looks ok but when i point the cursor to the allow of the /distance_as/_action/feedback:
This is weird, because when i point to the start point of this arrow,/distance_as/_action/feedback .
So i decided to remove publisher of /cmd_vel (I created this to stop robot when receiving SIGINT).
.
This was pretty clear, no crossing with /cmd_vel line.
Of course, I had no idea if this Line Crossing was causing the robot confused with which topic to refer.
But i just wanted make it clear.
I also check topic hz of /distance_as/_action/feedback,
However, it didnt work.
@reiko.iwamoto
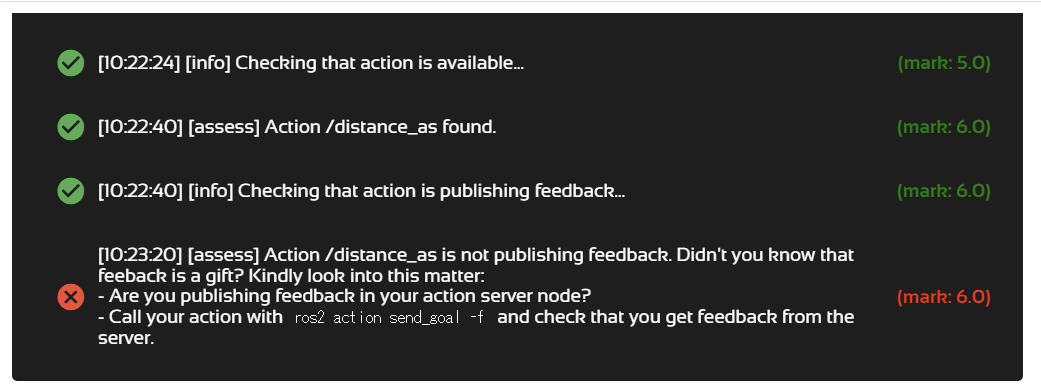
Based on the logs, it seems that calls to your action server are taking longer than expected to complete. After making this call from the command line
ros2 action send_goal -f /distance_as actions_quiz_msg/action/Distance '{seconds: 10}'
20 seconds later, the goal was yet to be accepted, let alone publishing feedback:
Waiting for an action server to become available...
Sending goal:
seconds: 10
Does your action server respond on time?
In any case, I can make the gradebot wait a little longer for the feedback, but ideally 20 seconds should be enough to start getting response from your action.
For now I will just add 2 more attempts for you, so you can try again after checking the responsiveness of your action server. Please let me know what you find.
Hi, @bayodesegun ,
#1 Action Server:
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_server.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-02-29-17-58-06-612252-2_xterm-14948
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_server_node-1]: process started with pid [14949]
[actions_quiz_server_node-1] [INFO] [1709229498.055512100] [actions_quiz_server]: Received goal request: 10
[actions_quiz_server_node-1] [INFO] [1709229498.056078321] [actions_quiz_server]: Executing goal
[actions_quiz_server_node-1] [INFO] [1709229499.056441108] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229500.056449120] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229501.056456573] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229502.056439453] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229503.056461339] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229504.056436477] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229505.056469803] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229506.056465288] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229507.056465209] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229508.056440376] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709229509.056615758] [actions_quiz_server]: Goal succeeded
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[actions_quiz_server_node-1] [INFO] [1709229705.892886682] [rclcpp]: signal_handler(signum=2)
[INFO] [actions_quiz_server_node-1]: process has finished cleanly [pid 14949]
user:~/ros2_ws$
.#3 Command-Line
user:~$ ros2 action send_goal -f /distance_as actions_quiz_msg/action/Distance "{seconds: 10}"
Waiting for an action server to become available...
Sending goal:
seconds: 10
Goal accepted with ID: 11c263200ed34431b13c255ee8d7e766
Feedback:
current_dist: 0.19295740127563477
Feedback:
current_dist: 0.38591480255126953
Feedback:
current_dist: 0.5788726806640625
Feedback:
current_dist: 0.7718300819396973
Feedback:
current_dist: 0.964787483215332
Feedback:
current_dist: 1.1577448844909668
Feedback:
current_dist: 1.3507022857666016
Feedback:
current_dist: 1.5436596870422363
Feedback:
current_dist: 1.7366175651550293
Feedback:
current_dist: 1.929574966430664
Result:
status: true
total_dist: 2.122532367706299
Goal finished with status: SUCCEEDED
user:~$
.#4 Topic
user:~$ ros2 topic echo /total_distance
data: 0.19295740127563477
---
data: 0.38591480255126953
---
data: 0.5788726806640625
---
data: 0.7718300819396973
---
data: 0.964787483215332
---
data: 1.1577448844909668
---
data: 1.3507022857666016
---
data: 1.5436596870422363
---
data: 1.7366175651550293
---
data: 1.929574966430664
---
data: 2.122532367706299
---
^Cuser:~$
.
Should I still submit again?
Please submit again, this time making sure that you do not have anything running in the terminals before submitting. This is a possible source of the delay the gradebot is experiencing.
Hi @bayodesegun ,
Okay, I have fine-tuned the gradebot to wait a bit more for the action server to start running. Please check again and let us know.
hi, @bayodesegun
.
.
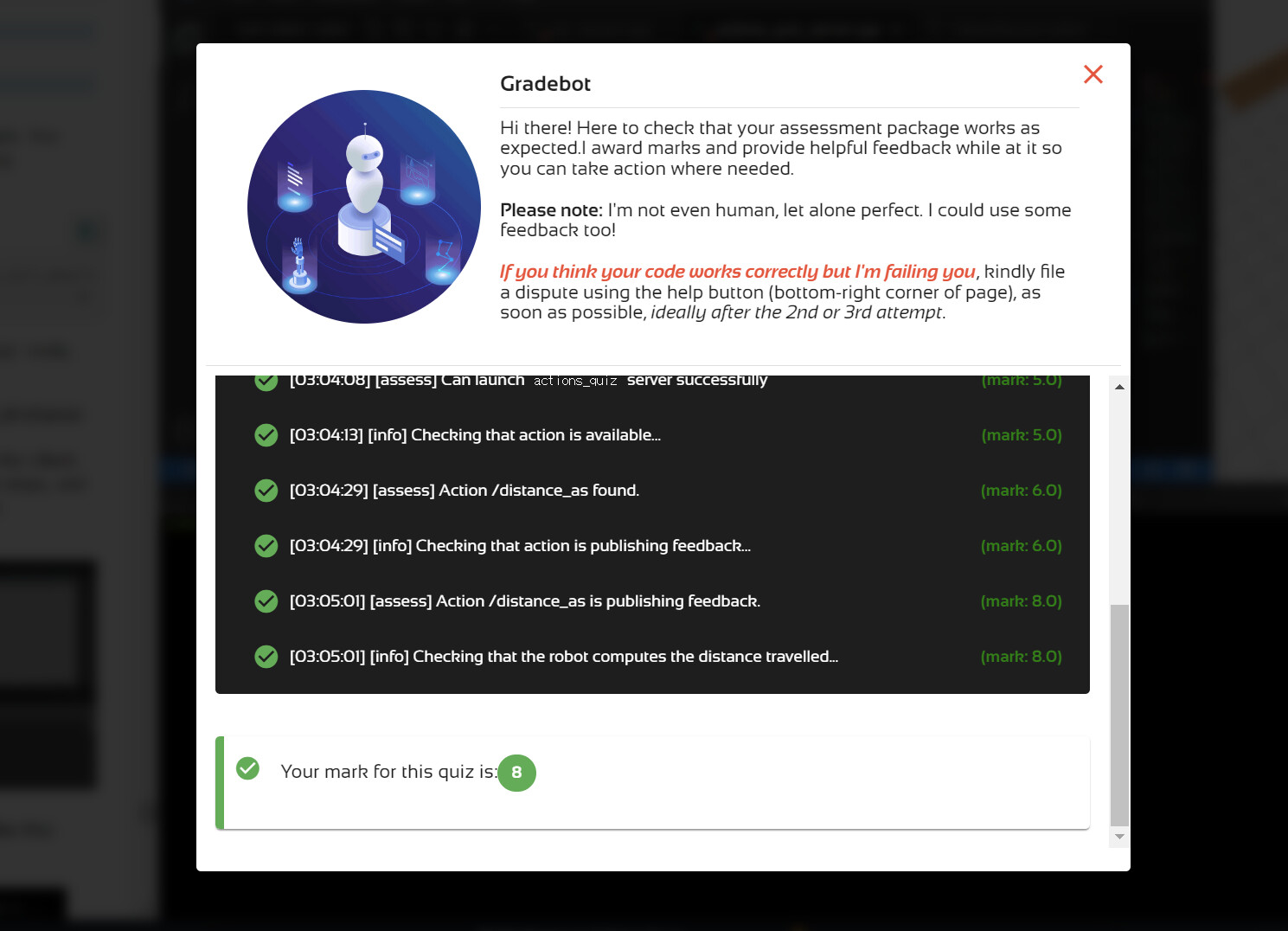
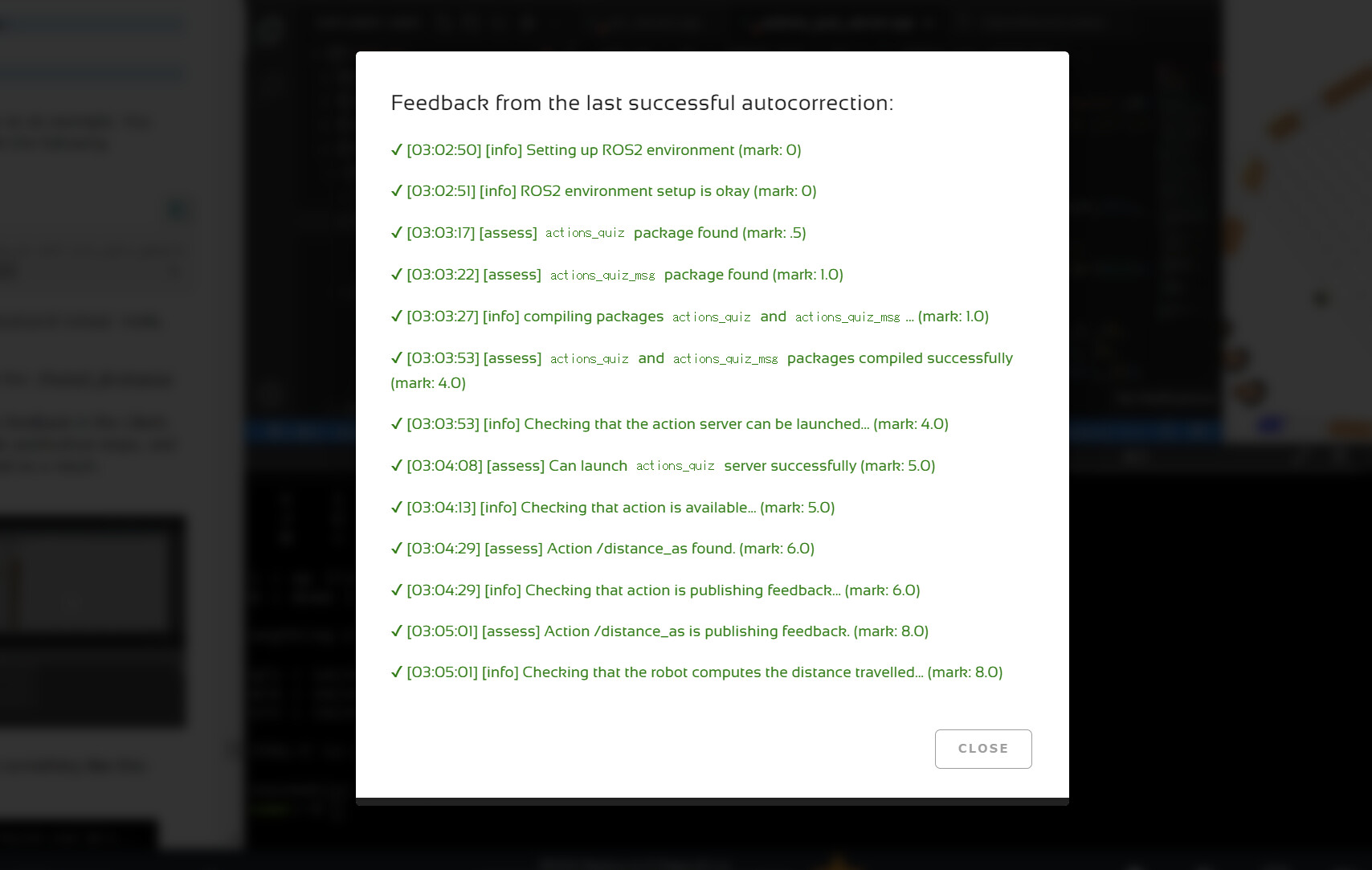
I could see what the Gradebot did in here:
shell#1
Action Server
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_server.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-03-05-16-00-39-511599-2_xterm-1235
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_server_node-1]: process started with pid [1236]
[actions_quiz_server_node-1] [INFO] [1709654443.309068203] [actions_quiz_server]: Received goal request: 10
[actions_quiz_server_node-1] [INFO] [1709654443.309478988] [actions_quiz_server]: Executing goal
[actions_quiz_server_node-1] [INFO] [1709654444.309735903] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654445.309806353] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654446.309772320] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654447.309806970] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654448.309776606] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654449.309782439] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654450.309752733] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654451.309777498] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654452.309801344] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654453.309777318] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654454.309928087] [actions_quiz_server]: Goal succeeded
[actions_quiz_server_node-1] [INFO] [1709654490.435049584] [actions_quiz_server]: Received goal request: 20
[actions_quiz_server_node-1] [INFO] [1709654490.435279280] [actions_quiz_server]: Executing goal
[actions_quiz_server_node-1] [INFO] [1709654491.435499962] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654492.435571216] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654493.435508619] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654494.435583459] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654495.435567359] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654496.435553368] [actions_quiz_server]: Publish feedback
[actions_quiz_server_node-1] [INFO] [1709654497.435563768] [actions_quiz_server]: Publish feedback
user:~/ros2_ws$
.
Shell#2 command-line & actionCLIENT
user:~$ ros2 action send_goal -f /distance_as actions_quiz_msg/action/Distance "{seconds: 10}"Waiting for an action server to become available...
Sending goal:
seconds: 10
Goal accepted with ID: f50a4ae5bf0743b8b403f33e59efb355
Feedback:
current_dist: -0.1946820616722107
Feedback:
current_dist: -0.389364093542099
Feedback:
current_dist: -0.5840461850166321
Feedback:
current_dist: -0.7787282466888428
Feedback:
current_dist: -0.9734103083610535
Feedback:
current_dist: -1.1680923700332642
Feedback:
current_dist: -1.36277437210083
Feedback:
current_dist: -1.5574564933776855
Feedback:
current_dist: -1.752138614654541
Feedback:
current_dist: -1.9468204975128174
Result:
status: true
total_dist: -2.1395559310913086
Goal finished with status: SUCCEEDED
user:~$ cd ros2_ws/
user:~/ros2_ws$ ros2 launch actions_quiz actions_quiz_client.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-03-05-16-01-29-281954-2_xterm-1359
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [actions_quiz_client_node-1]: process started with pid [1360]
[actions_quiz_client_node-1] [INFO] [1709654490.434631340] [actions_quiz_client]: Waiting for Action Server to become available...
[actions_quiz_client_node-1] [INFO] [1709654490.434862059] [actions_quiz_client]: Sending goal: seconds: 20
[actions_quiz_client_node-1] [INFO] [1709654490.435410160] [actions_quiz_client]: Goal accepted by server, waiting for result
[actions_quiz_client_node-1] [INFO] [1709654491.435583472] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.194933
[actions_quiz_client_node-1] [INFO] [1709654492.435645641] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.389866
[actions_quiz_client_node-1] [INFO] [1709654493.435566815] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.584800
[actions_quiz_client_node-1] [INFO] [1709654494.435687902] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.779733
[actions_quiz_client_node-1] [INFO] [1709654495.435647548] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 0.974667
[actions_quiz_client_node-1] [INFO] [1709654496.435621173] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.169600
[actions_quiz_client_node-1] [INFO] [1709654497.435644869] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.364533
[actions_quiz_client_node-1] [INFO] [1709654498.435618875] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.559466
[actions_quiz_client_node-1] [INFO] [1709654499.435635823] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.754400
[actions_quiz_client_node-1] [INFO] [1709654500.435646945] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 1.949333
[actions_quiz_client_node-1] [INFO] [1709654501.435664314] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.144266
[actions_quiz_client_node-1] [INFO] [1709654502.435645978] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.339200
[actions_quiz_client_node-1] [INFO] [1709654503.435657704] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.534133
[actions_quiz_client_node-1] [INFO] [1709654504.435634264] [actions_quiz_client]: Feedback received:
[actions_quiz_client_node-1] Current Distance 2.729066
[actions_quiz_client_node-1] [INFO] [1709654505.435638692] [actions_quiz_client]: Feedback received:
user:~/ros2_ws$
The feedback check is good, thank you.
hi, @bayodesegun
system
March 11, 2024, 1:31pm
15
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.