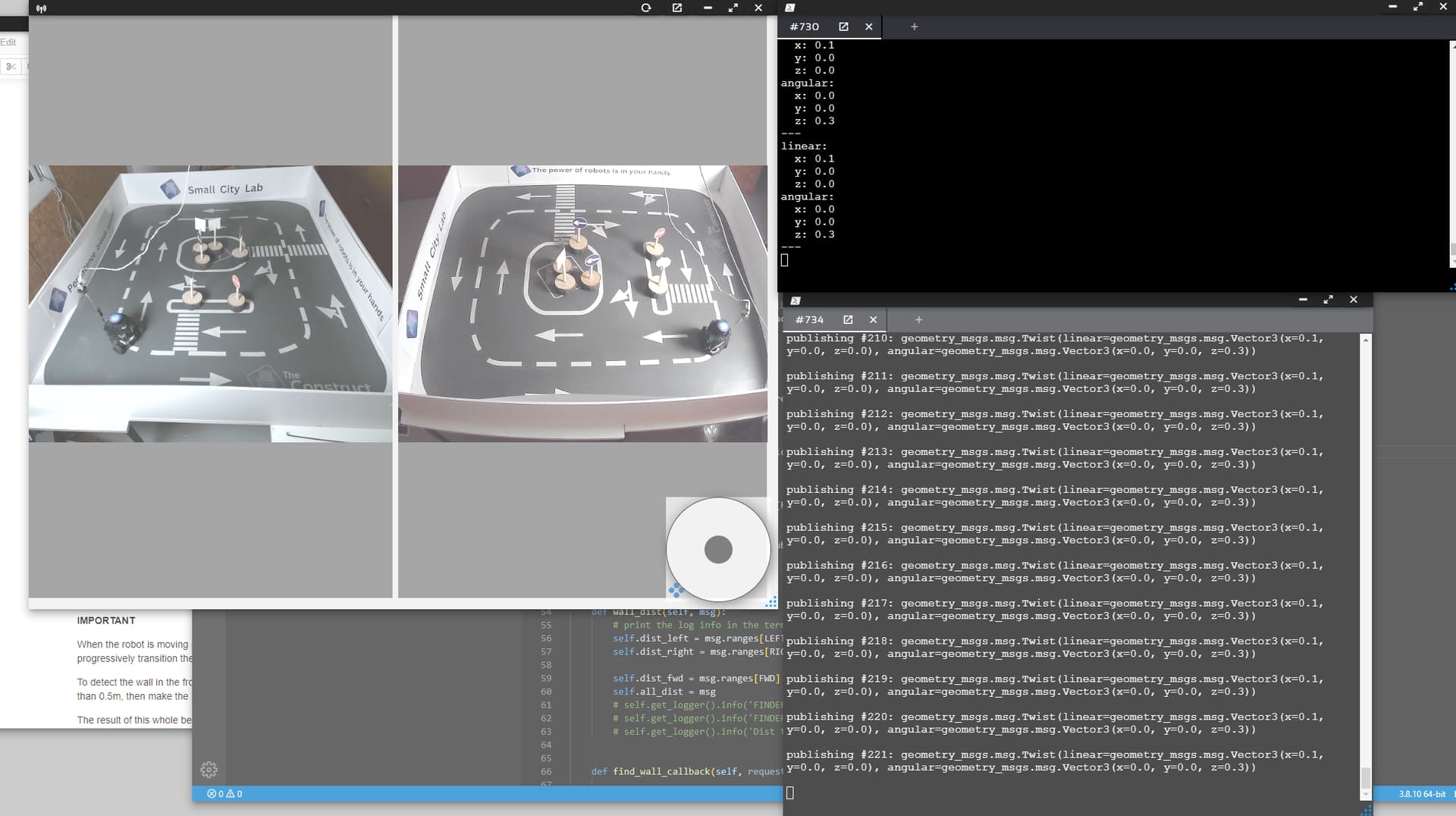
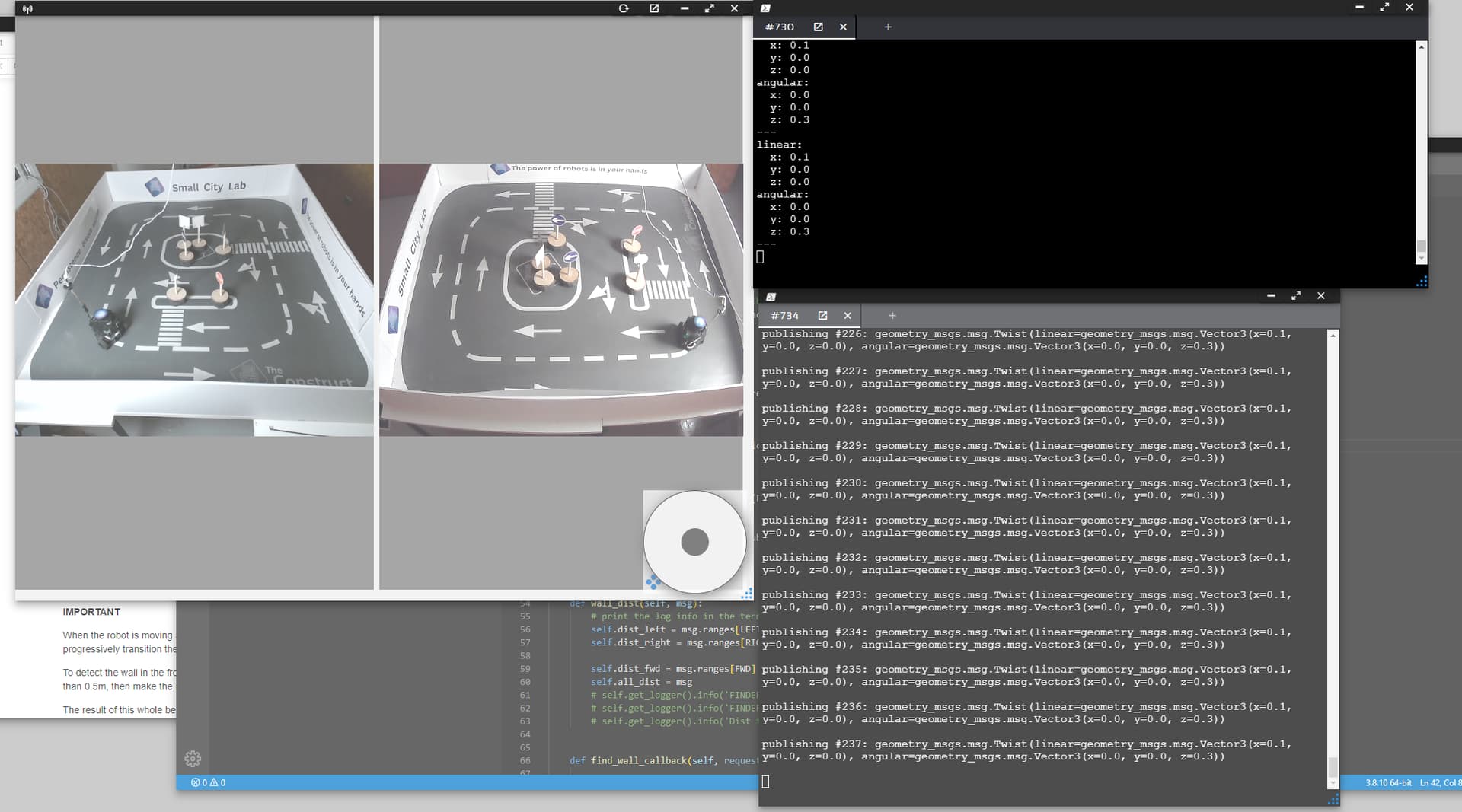
I am attempting to use the Real Robot for Section 2 (implementing the find_wall behaviour using a Service Server/Client) of the ROS in 5 days (Python) unit. I am having issues where the robot is not responding to any of my terminal commands. It responds to the joystick, but not to the terminal. I tried to investigate this by looking at the ros2 topic list and echoing different topics. I then tried publishing to the cmd_vel topic while I was echoing the topic. The echo of the topic showed a response (see screenshots) but the robot still did not move.
Is this an issue on my side of things or the website side of things?
Hi Ash,
if the robot moves with the web joystick, then is may mean an error on your side. But I’m not 100% sure, it could also be an error of the system.
Can you post here the command you are sending to the topic?
Also, post the output of ros2 topic list
Also take screenshots of the whole screen (by showing just a small part of the screen, you are discarding a lot of info that is useful for us to help you find the problem quicker).
Having said that, @rodrigo55 is going to look at the system and see if there is a problem in the lab, and let you know his conclusion
Thank you for the quick response @rtellez! Unfortunately my booking has run out and I will not be able to run it again until maybe Monday. From memory, ros2 topic list had about 6 topics listed. I remember seeing /scan, /odom and /cmd_vel. I don’t remember the others.
Unfortunately I wasn’t able to reproduce your error. I was able to move the robot (in ROS 2) with the joystick, as well as through the terminal, I also see /scan and /odom. I’ll investigate if this was a particular one-time issue, but I invite you to please try again by reserving and connecting to the robot.
Hi, I just tried again. Still having the same problem. I’ve attached more screenshots below, that show the code working in simulation, but not working with the real robot. Again, the joystick works and ros2 topic echo /cmd_vel shows that cmd_vel is receiving messages.
Are you publishing within the speed limit of the robot? angular.z: 1.0 looks too high. The real robot has a speed limit stated in the notebook. Please check and confirm.
Hi Ash,
I have tested the system deeply your examples with my own account, and also with your account and the rosject and everything worked perfectly. I can move the robot with both the joystick and with your command (copy/pasted).
I cannot understand what is happening there for you. We need to have a meeting where you show me what you do from the beginning. Are you available tomorrow Wednesday?