You need to wait for the bridge to start up and bridge all the topics before you can actually make use of the bridged topics. You cannot just enter the bridge commands and try to get data from bridged ros2 topics.
Best thing to do is: once you are connected to the real robot, use one terminal to start the bridge and wait for about 15 to 30 seconds until the bridge has connected all topics.
Then you can use ros2 topic echo ... command to get data.
Thanks for your response. I did this. I started the ros bridge and then waited until the messages arrived of the bridge being successfully. I waited around 5mins, but nothing came.
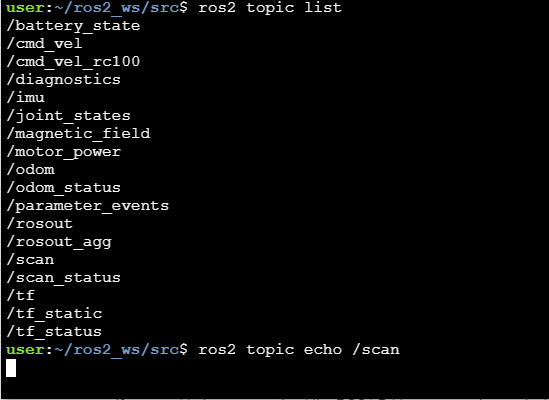
Eventho the topics were shown available in ros2 topic list. But echo the /scan topic or publishing to the /cmd_vel topic didn’t show any results.
But therefore the ros bridge is nessecary to test with the real robot?
This is usually due to a faulty bridge connection.
Again, due to a disconnected bridge error. You need to terminate and restart the bridge once or twice to get it running properly.
Yes. If you are trying to use ROS2 program on the TurtleBot Real Robot then you need the ROS Bridge since the TurtleBot runs on ROS1.
Here is quick tip for you. Try using dynamic_bridge and check if bridging works. But mind the fact that dynamic_bridge is very slow when it runs. So you need have patience. But once you know that all topics are bridged and working properly with dynamic_bridge, you can be sure that those topics will work correctly when using parameter_bridge.