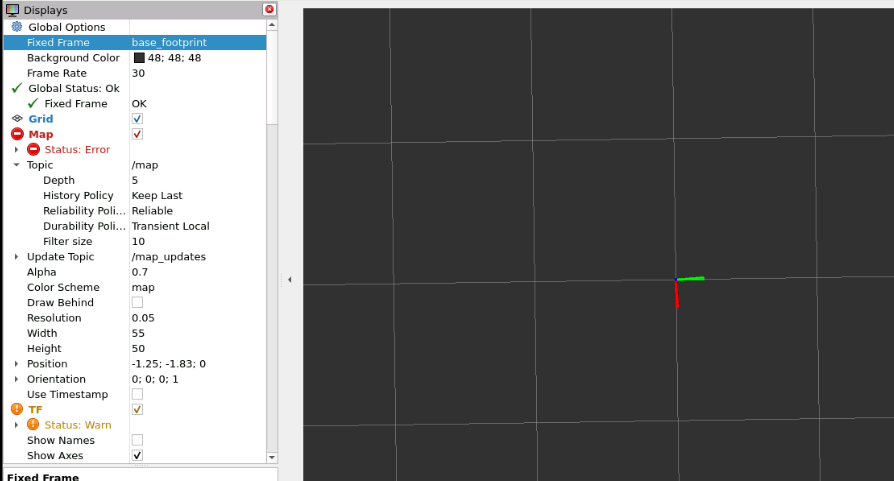
Thanks. Do you mean selecting base_footprint as the Fixed Frame? Because that does not work for me. This is what rviz looks like when I launch it (with an rviz config file that worked for the simulation):
[planner_server-3] [INFO] [1707892003.058518158] [global_costmap.global_costmap]: Timed out waiting fortransform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[amcl-2] [INFO] [1707892003.081487843] [amcl]: Message Filter dropping message: frame 'base_scan' at time 1707892001.503 for reason 'discarding message because the queue is full'
[rviz2-7] [INFO] [1707892003.092787424] [rviz2_node]: Message Filter dropping message: frame 'base_scan' at time 1707892001.503 for reason 'discarding message because the queue is full'
The map disappears in rviz when I select base_footprint as the Fixed Frame and I get these additional warnings:
[rviz2-7] Warning: Invalid frame ID "map" passed to canTransform argument source_frame - frame does notexist
[rviz2-7] at line 93 in ./src/buffer_core.cpp
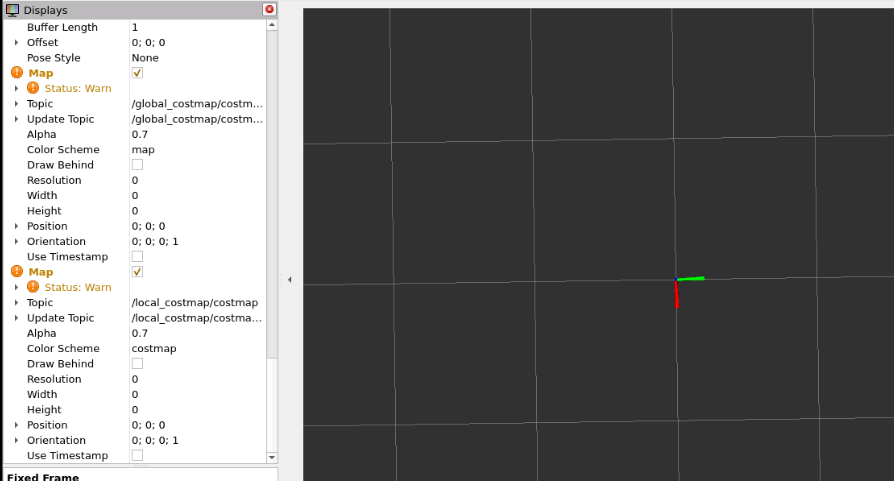
Here are images of my rviz where warnings or errors are shown in the Display panel: