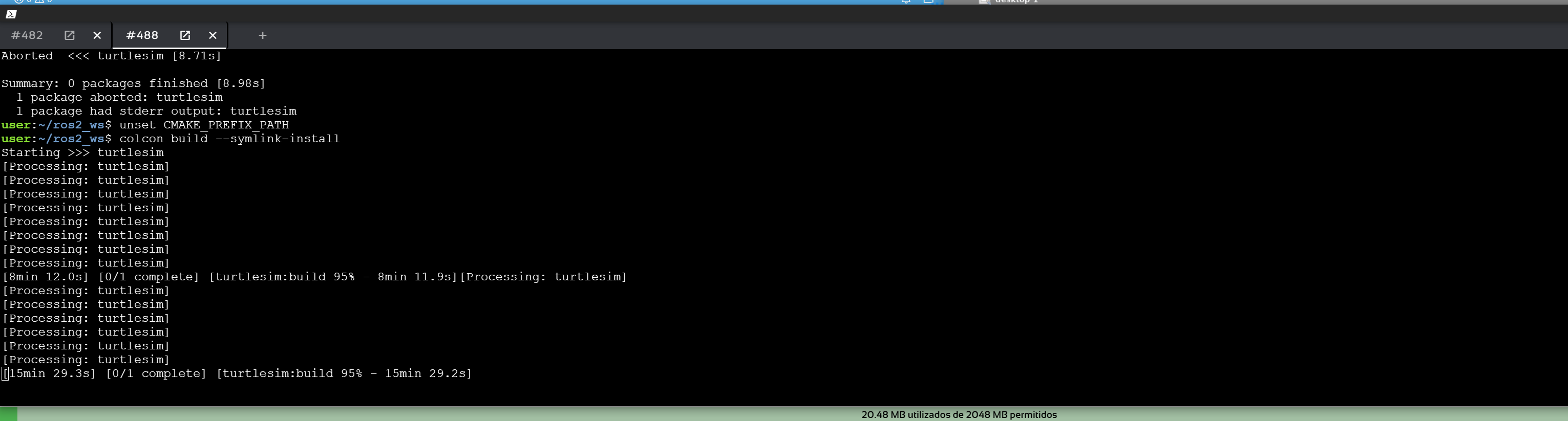
I’ve been experiencing really long times for using colcon build in a workspace with just one package. I’m following the guides of ROS2 Jazzy, and sometimes the compilation even breaks, and force me to use the flag --executor sequential.
Are there any tips or guidance in how to improve this process?
I’m assuming the package you are trying to compile is the default turtlesim?
If that’s the case, can I ask why are you compiling it from source? Are you making changes to it?
There is an apt package that is already installed in your rosject for the turtlesim. If you can’t run it with ros2 run turtlesim turtlesim_node, then that means that it’s not installed or the distro is not sourced. So you can do that with this:
Thanks for the reply @roalgoal. As I said, I was following the guidelines of ROS2 Tutorials (the originals from docs.ros.org), so one of the steps was to install a package and make a modification, in order to see how it differs from the version installed using apt.
I did compile another one, like rclcpp and rclpy examples and did last a long time as well. Althought, creating a new package and compiling it with a simple node was almost instant.