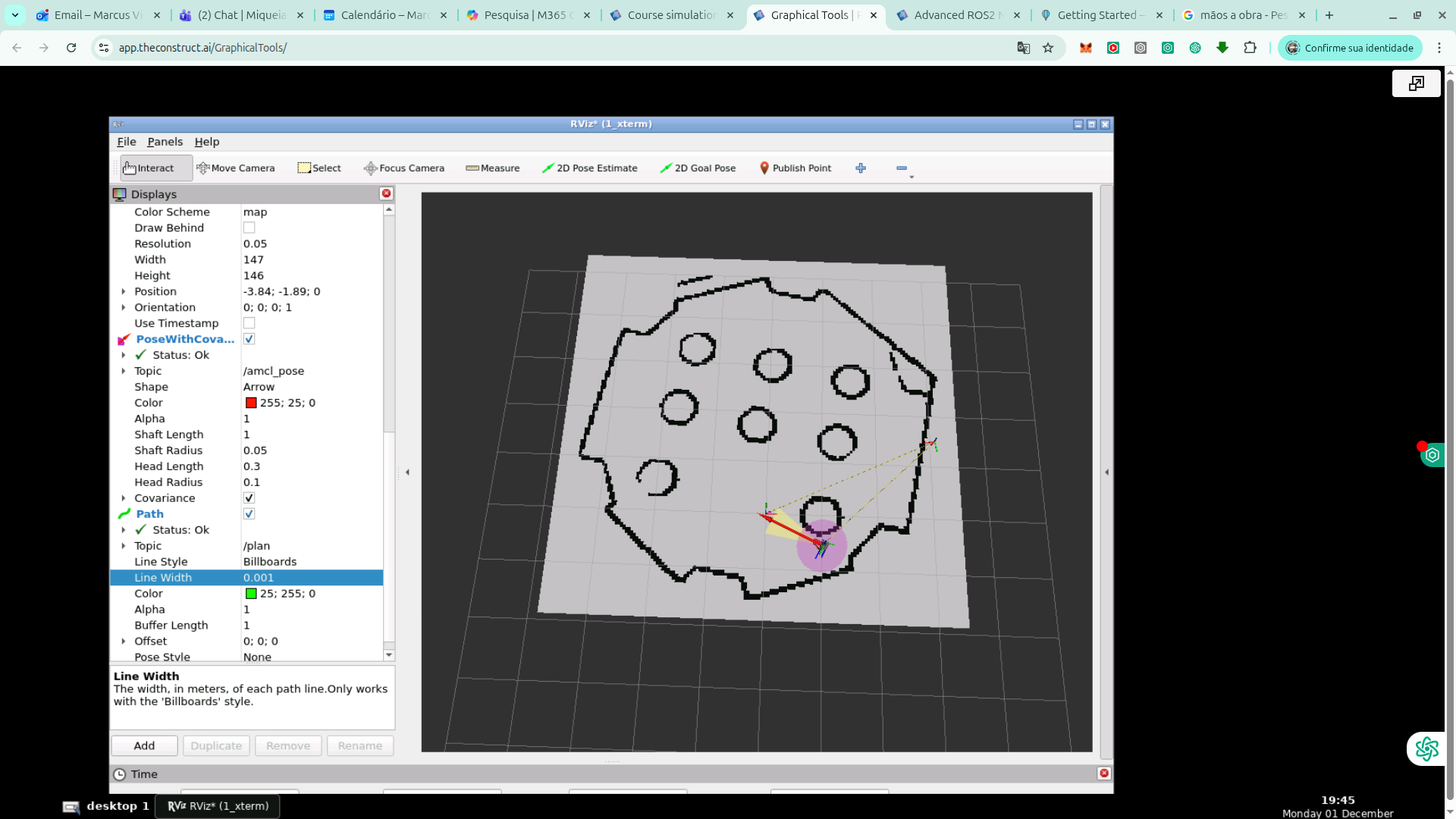
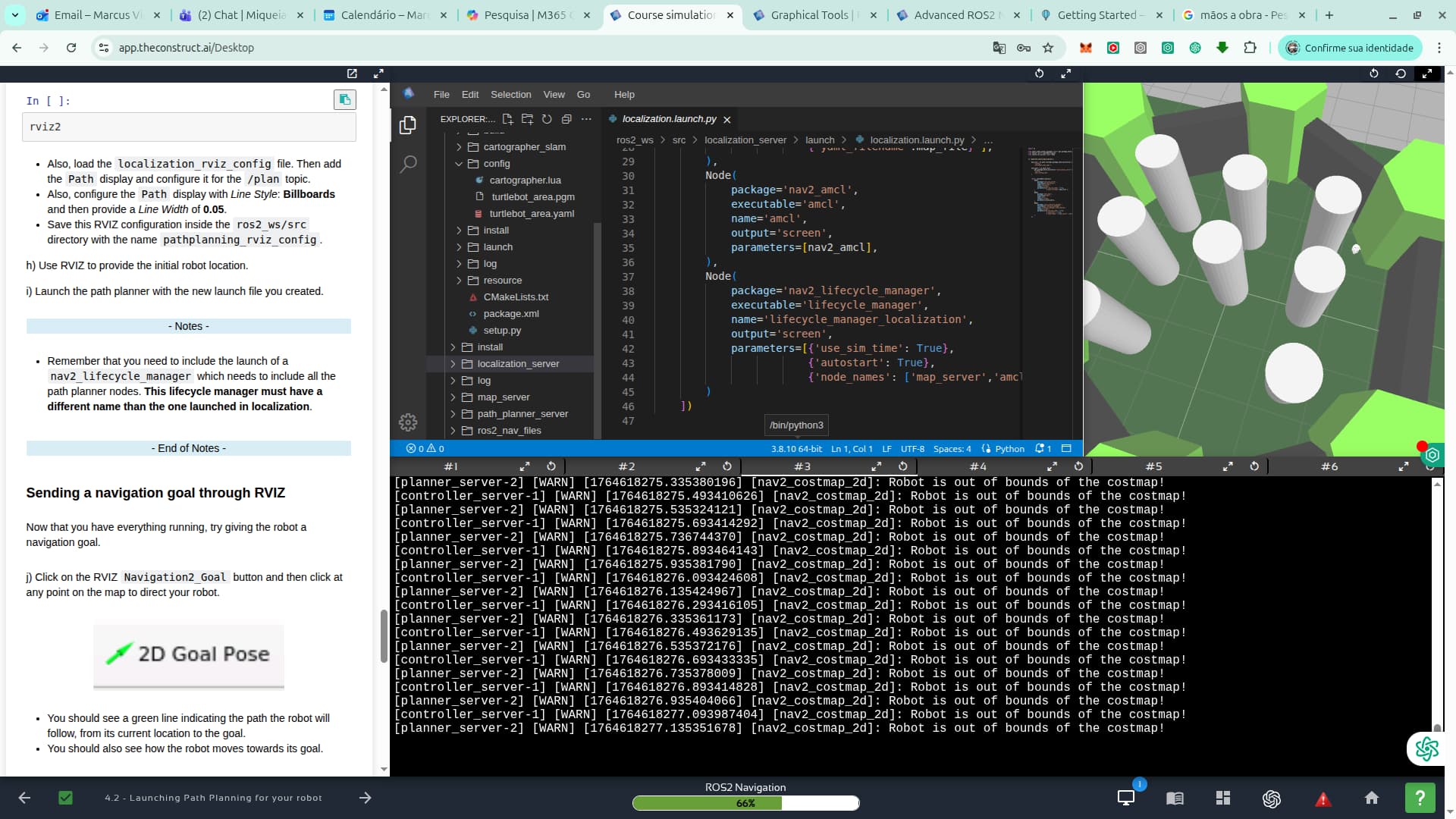
Hi I am having this issue when sending a goal pose on lesson “4.2 Launching Path Planning for your robot”, Some idea of the root of this issue? I believe this is not the cause that the robot is not creating a path. I am also following/reproducing these tutorials, from mapping to control, at my personal laptop (to review my navigation skills) and I am also not being able to create a path at my pc, but due other not trivial issues (unless if launching the “ready to use” complete navigation2 tutorial: https://docs.nav2.org/getting_started/index.html: ros2 launch nav2_bringup tb3_simulation_launch.py headless:=False
I would like assistance to understand what step am I missing? Someone had similar issues in this class ? Thanks in advance.