Hello!!
I am starting with ROS and Rviz and I am having troubles to upload my launch file to Rviz. I know there is a similar question in the forum but it is not answered. I upload the package from github → /ros-industrial/kuka_experimental/tree/melodic-devel/kuka_lbr_iiwa_support
I am using ROS Noetic as it seems to be the version needed but I am not sure. Actually the package appear on a Melodic GitHub directory but then within the package it says Noetic. I am not sure about this.
The thing is that when I put this:
c:\catkin_ws> .\devel\setup.bat (sourcing the setup.bat)
c:\catkin_ws>roslaunch kuka_lbr_iiwa_support load_lbr_iiwa_14_r820.launch
It runs OK:
… logging to C:\Users\MyUser.ros\log\e0570090-0b67-11ee-8ce6-98fa9b82fd60\roslaunch-LAPTOP-LS9MHBSO-18760.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://127.0.0.1:63077/
SUMMARY
PARAMETERS
- /robot_description: <?xml version="1…
- /rosdistro: noetic
- /rosversion: 1.15.9
NODES
auto-starting new master
process[master]: started with pid [19132]
ROS_MASTER_URI=http://127.0.0.1:11371
setting /run_id to e0570090-0b67-11ee-8ce6-98fa9b82fd60
process[rosout-1]: started with pid [14176]
started core service [/rosout]
And in another terminal I run source again and run de rviz:
c:\catkin_ws>.\devel\setup.bat
c:\catkin_ws>rosrun rviz rviz
Rviz opens and when I add the robot state:
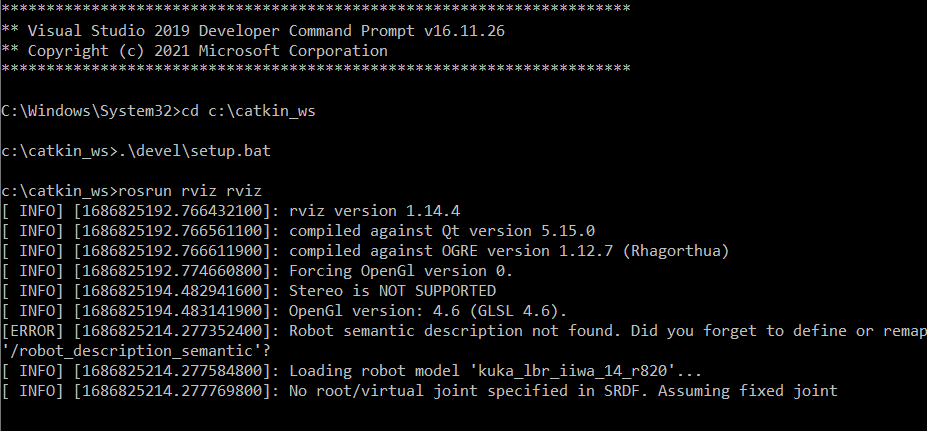
Nothing appears in the Rviz…
I dont know why this happens, may be it is not the ROS version the package need or may be it is because I am doing this on Windows, but the thing is that everything seems to be compatible until the last step.
Thank you very much for you time.