I wanted to know how to make the robot stop closer to the wanted goal pose?
I changed in the controller the xy_goal_tolerance that seems to be the parameter corresponding to the problem but it only made the things worse. It still stops before but spin at the same spot for some time and the stops.
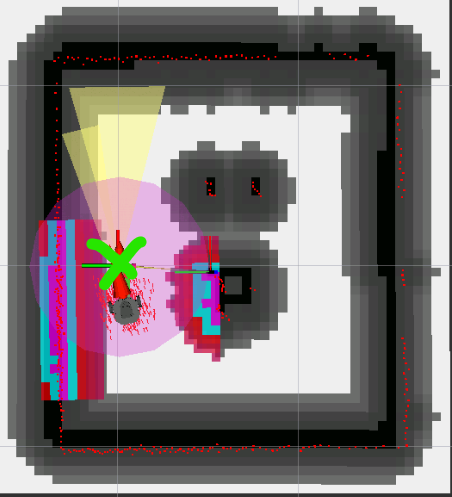
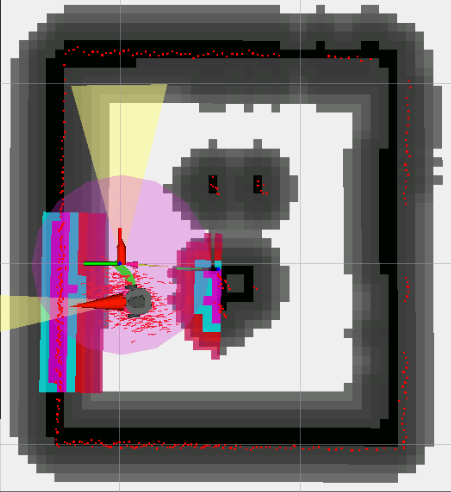
The 2 pictures below where givent the same goal with approximately the same start.
To have better goal positioning, you need to have better map resolution so that goal tolerance can be better. I believe your map resolution is 0.5? Use 0.1 or 0.05 as resolution - this will increase map pixel density, so you can navigate better.
I’m already in 0.05 but I found out that I missed one of the xy_goal_tolerance in the controller thats why it wouldn’t get closer.
Theonly limit is that if I put a too small tolerance the robot will spend a lot of time to the final step to try to reach the goal.