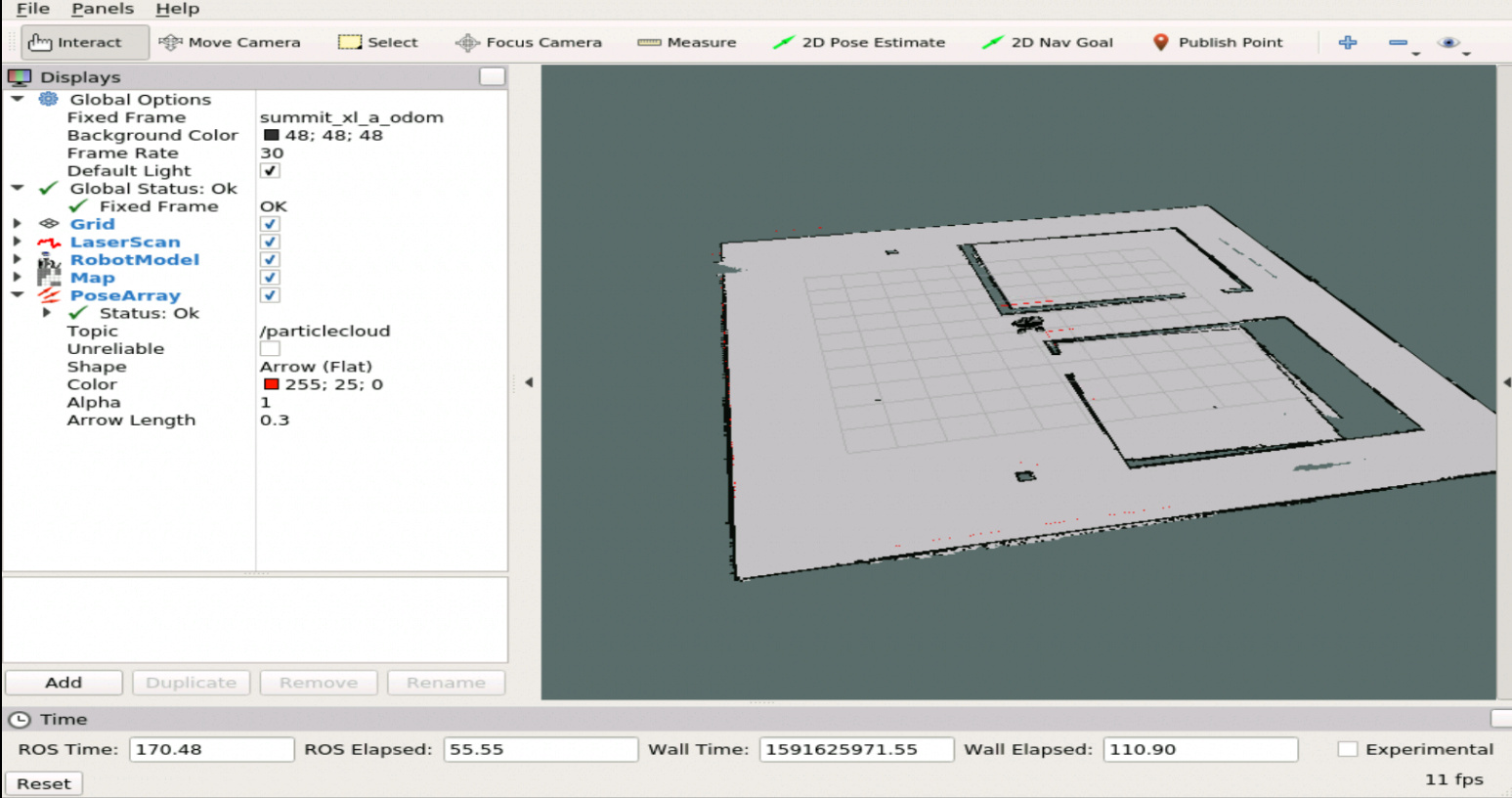
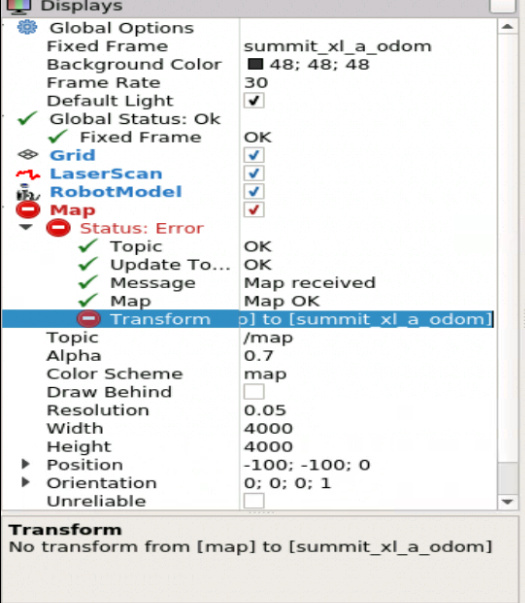
Hello. I am currently trying to work on the ROS nav project, but I cannot get the system to publish and /particlecloud data. I think there may be an issue with the transforms, as Rviz displays an error stating there is no transform between map and summit_xl_a_odom.
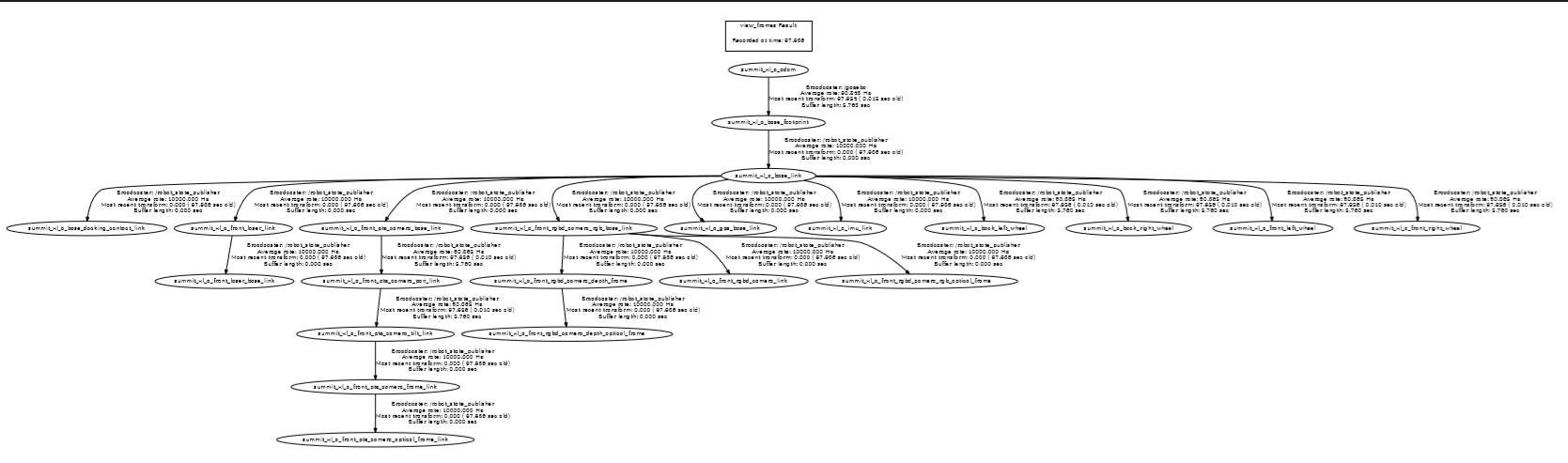
I took a look at the frames graph, and it is totally different from the one show in the project document.
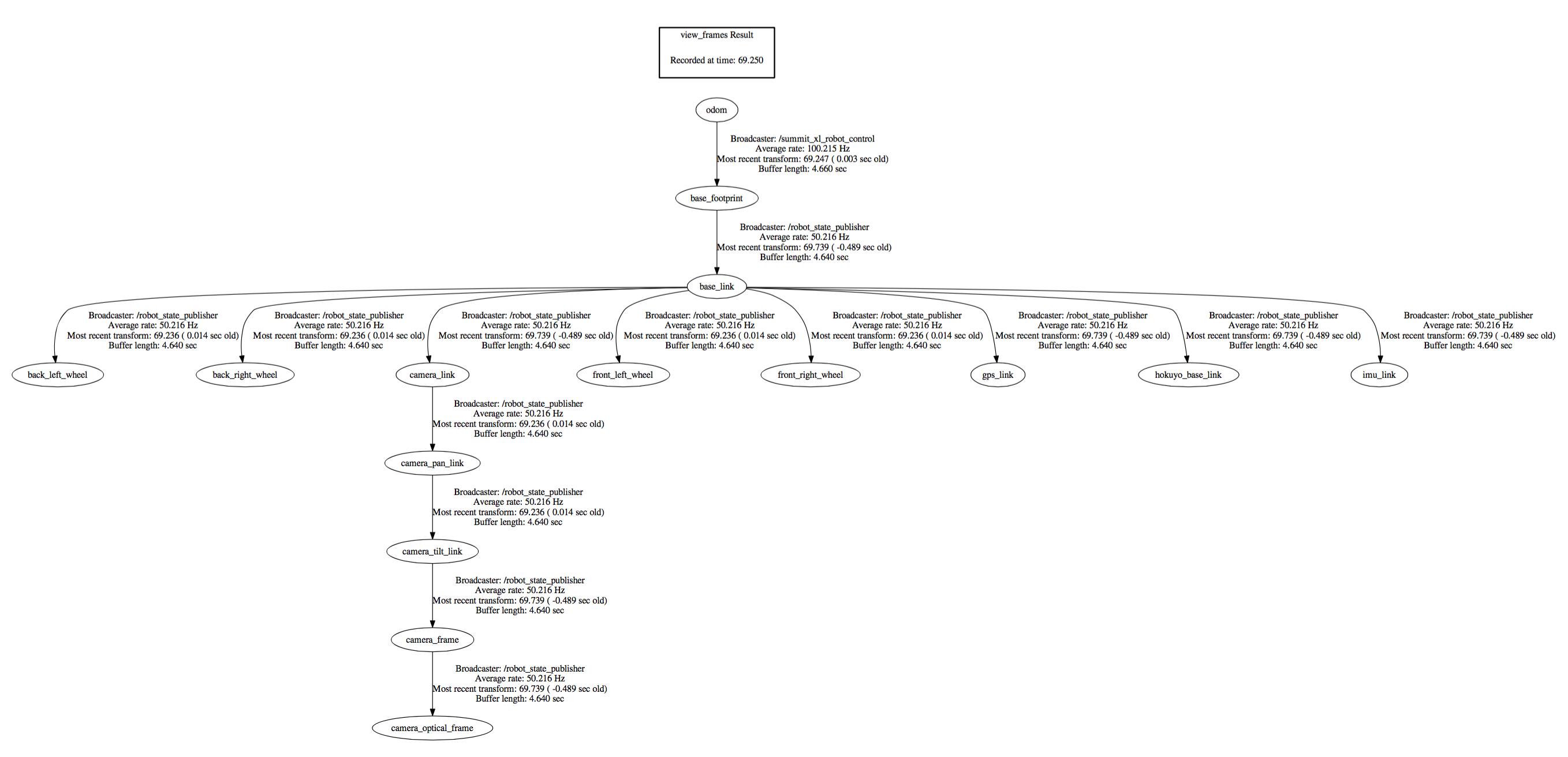
Project document:
Generated frames graph:
I’ve tried several things, including forcing the transform in a launch file, to no avail. Here is the AMCL node launch file I’m trying to use. Any help would be greatly appreciated.
<?xml version="1.0"?><param name="use_map_topic" value="$(arg use_map_topic)"/>
<!--
<param name="odom_frame_id" value="summit_xl_a_odom"/>
<param name="base_frame_id" value="summit_xl_a_base_link"/>
<param name="global_frame_id" value="map"/>
-->
<!--<remap from="map" to="/map"/>-->
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="5.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<remap from="scan" to="$(arg scan_topic)"/>