I am not able to move the robot using joystick/teleop
edit:
Tried restarting everything, but the same error exists.
I am not able to move the robot using joystick/teleop
edit:
Tried restarting everything, but the same error exists.
Hi Ashish, that is strange. Did this happen during the session you were able to succesfully navigate?
If this was a different session, then maybe the robot controllers had trouble starting and they got stuck restarting forever. I believe this is due to an old lidar sensor.
I will replace the lidar so please let me know if you run into a similar issue
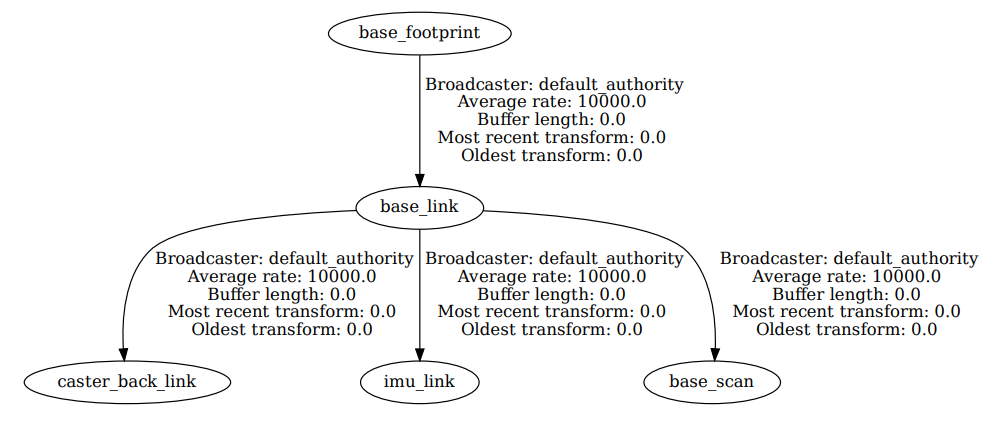
Yesterday it gave good TF Data but now today suddenly it stops working, i cant even move the robot with teleop and joystick.
Then let me make those maintenance changes.
This is weird since there is another student using it right now with no problems, so hopefully this will help.
Today i have checked thrice during my session i too felt weird.
Can you let me know once you have finished your changes in Real Robot, so that i can Test one more time and ill book a session to present.
now iam getting like this
and i cant able to move robot using teleop command and joystick and not able to visualize the pose and scan data in rviz.
edit:
when i open real robot in ROS2 basics Rosject, robot is moving but in ROS Nav2 its not moving and iam getting like this
Hi @AshishVarma,
That is very strange that you can control the robot in one rosject and not in another. The connection is the same, so there should not be a difference.
As for the “No gamepad connected.” message, it does not affect anything. It’s just a message that appears if it detects no USB controller that the robot can be controlled with.
Let me check the robot with your rosject to see if I can spot any issues, because the robot is working well.
I don’t know what’s the reason but now everything is working super fine.
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.