Are you sure that your /odom and /scan are working correctly? Local planner depends on these data.
Also, you need to specify window height and width for your local costmap.
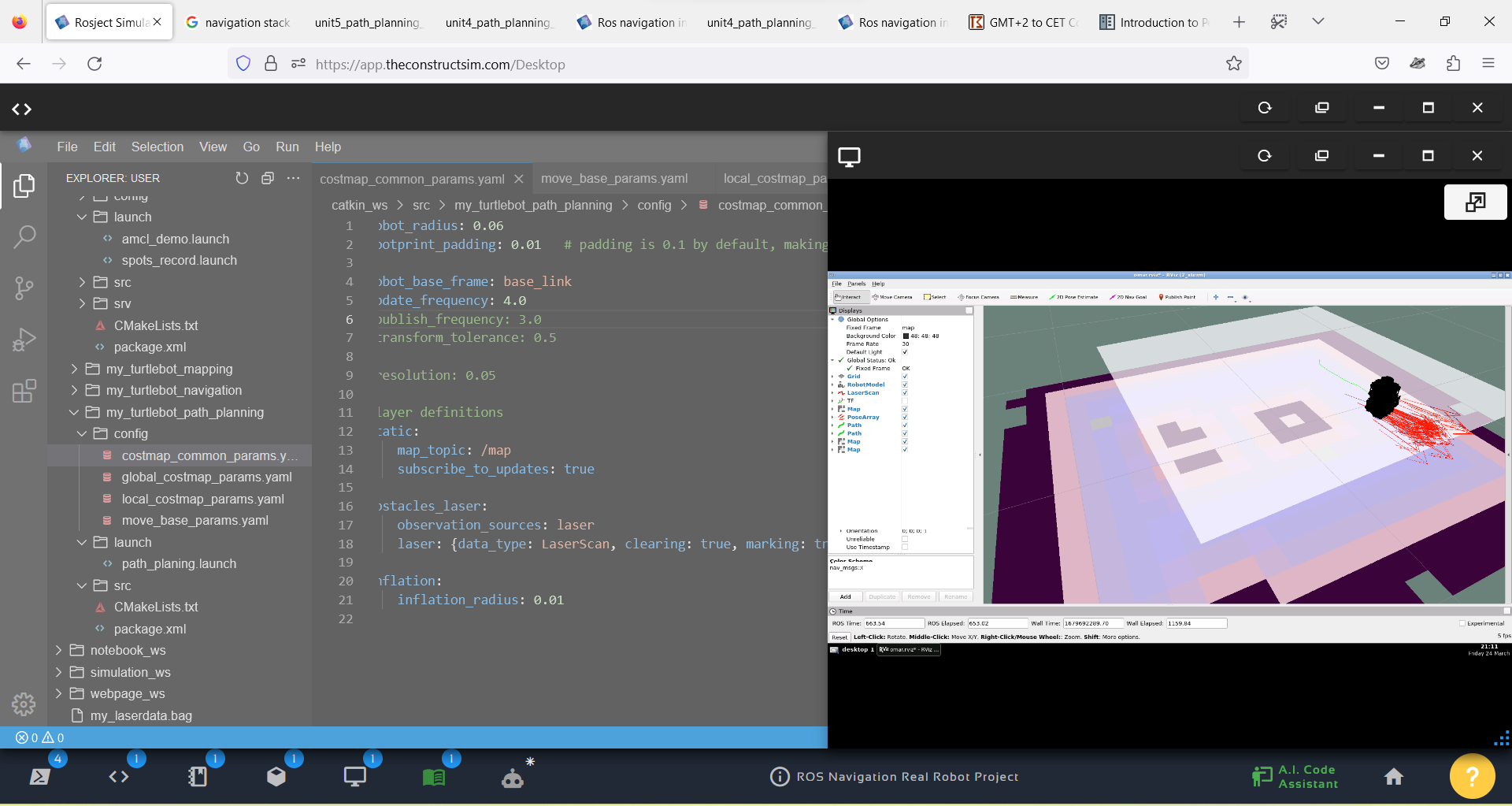
Perhaphs if you post your common_costmap_params, global_costmap_params and local_costmap_params files, then I could perhaps fix your problem.
robot_radius: 0.06
footprint_padding: 0.0 # padding is 0.1 by default, making difficult to pass through narrow places
robot_base_frame: base_link
update_frequency: 4.0
transform_tolerance: 0.5
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true, obstacle_range: 5.5}
inflation:
inflation_radius: 0.001
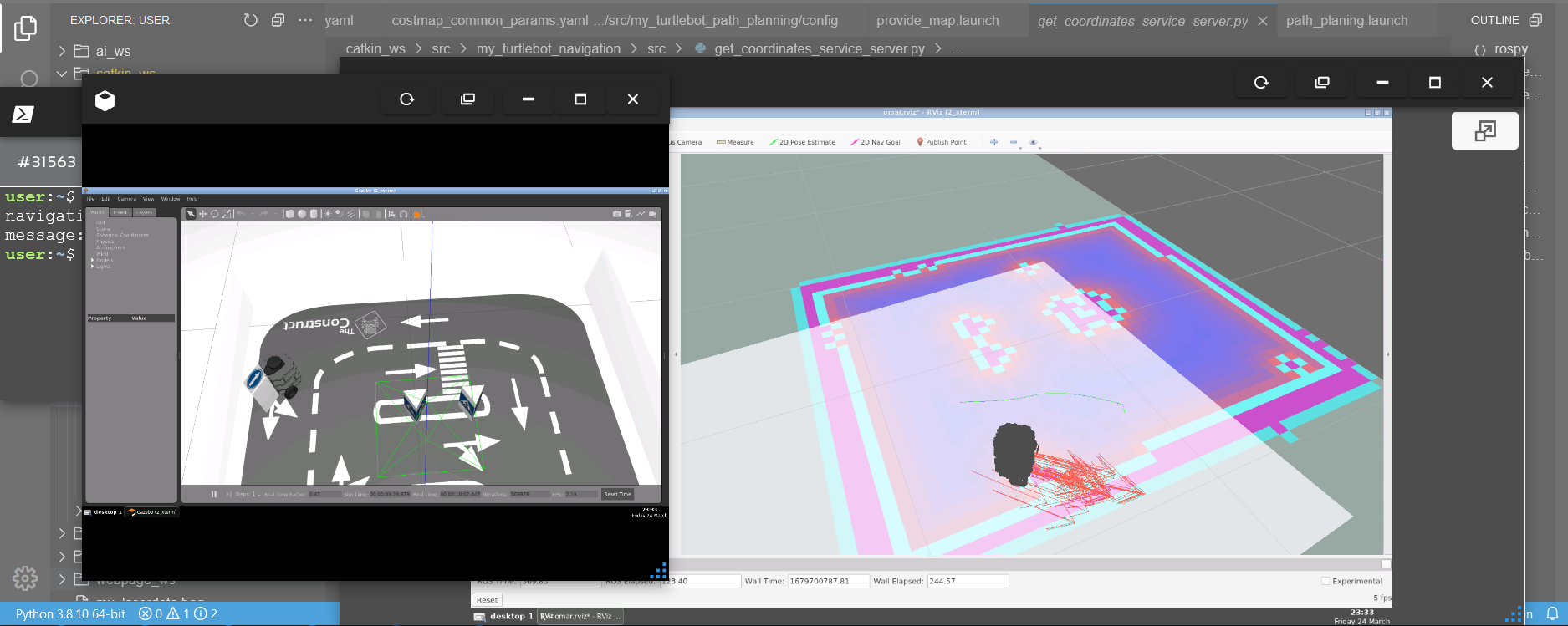
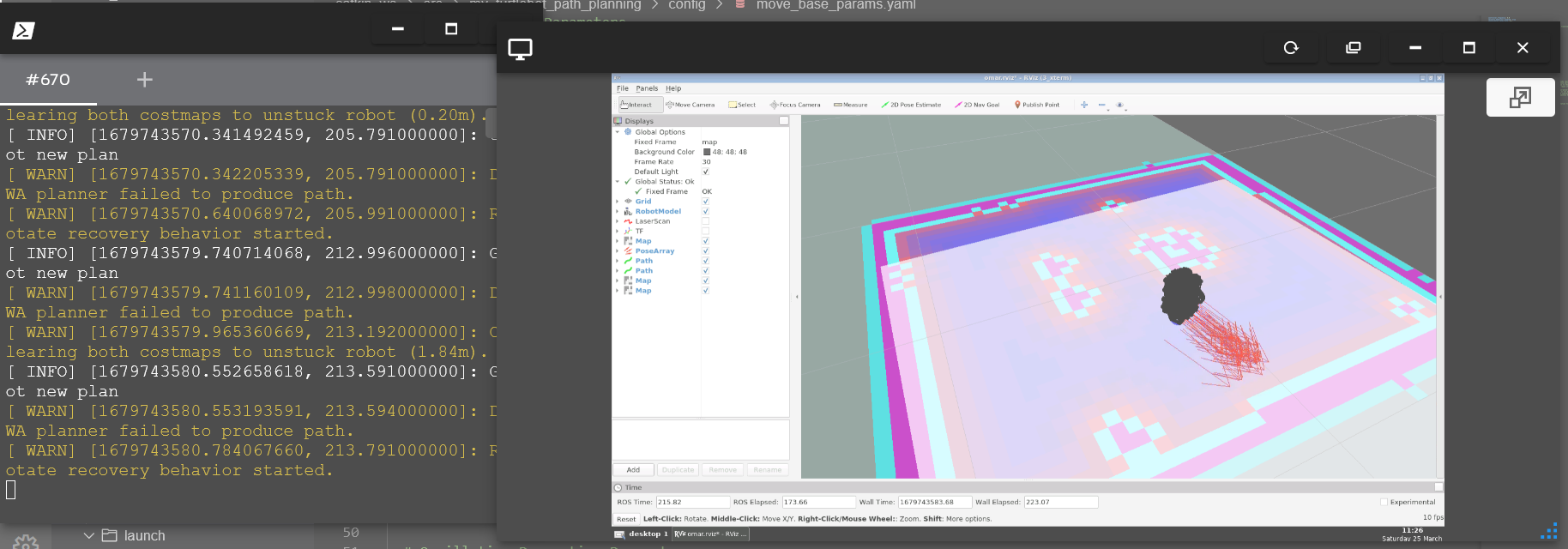
i made some modifications on the move_base-param to reduce speed but now the robot always shows failed to produce the path
controller_frequency: 5.0
recovery_behaviour_enabled: true
conservative_reset_dist: 0.2
NavfnROS:
allow_unknown: true # Specifies whether or not to allow navfn to create plans that traverse unknown space.
default_tolerance: 0.1 # A tolerance on the goal point for the planner.
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 0.5 #0.1
acc_lim_theta: 0.5 #0.2
max_vel_x: 1 #0.3
min_vel_x: 0.1
max_vel_theta: 1 #0.25
min_vel_theta: -1 #-0.25
min_in_place_vel_theta: 0.2
holonomic_robot: false
escape_vel: -0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.02
angular_sim_granularity: 0.02
vx_samples: 6
vtheta_samples: 20
controller_frequency: 20.0
# Trajectory scoring parameters
meter_scoring: true # Whether the gdist_scale and pdist_scale parameters should assume that goal_distance and path_distance are expressed in units of meters or cells. Cells are assumed by default (false).
occdist_scale: 0.1 #The weighting for how much the controller should attempt to avoid obstacles. default 0.01
pdist_scale: 0.75 # The weighting for how much the controller should stay close to the path it was given . default 0.6
gdist_scale: 1.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed default 0.8
heading_lookahead: 0.325 #How far to look ahead in meters when scoring different in-place-rotation trajectories
heading_scoring: false #Whether to score based on the robot's heading to the path or its distance from the path. default false
heading_scoring_timestep: 0.8 #How far to look ahead in time in seconds along the simulated trajectory when using heading scoring (double, default: 0.8)
dwa: true #Whether to use the Dynamic Window Approach (DWA)_ or whether to use Trajectory Rollout
simple_attractor: false
publish_cost_grid_pc: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
escape_reset_dist: 0.1
escape_reset_theta: 0.1
DWAPlannerROS:
# Robot configuration parameters
acc_lim_x: 0.5 #0.09
acc_lim_y: 0.5
acc_lim_th: 0.5 #0.1
max_vel_x: 1 #0.2
min_vel_x: 0.1
max_vel_y: 1
min_vel_y: 0.1
max_vel_trans: 0.1 #0.05
min_vel_trans: 0.01
max_vel_theta: 1 #0.25
min_vel_theta: 0.05
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.1
latch_xy_goal_tolerance: false
resolution: <same value as "delta" in amcl>
cost_scaling_factor: 3.0
You need to add sensor_frame to laser in obstacle_layer:
obstacles_layer: # obstacles_laser is spelling mistake, it must be layer, not laser.
observation_sources: laser
laser: {sensor_frame: base_scan, data_type: ...
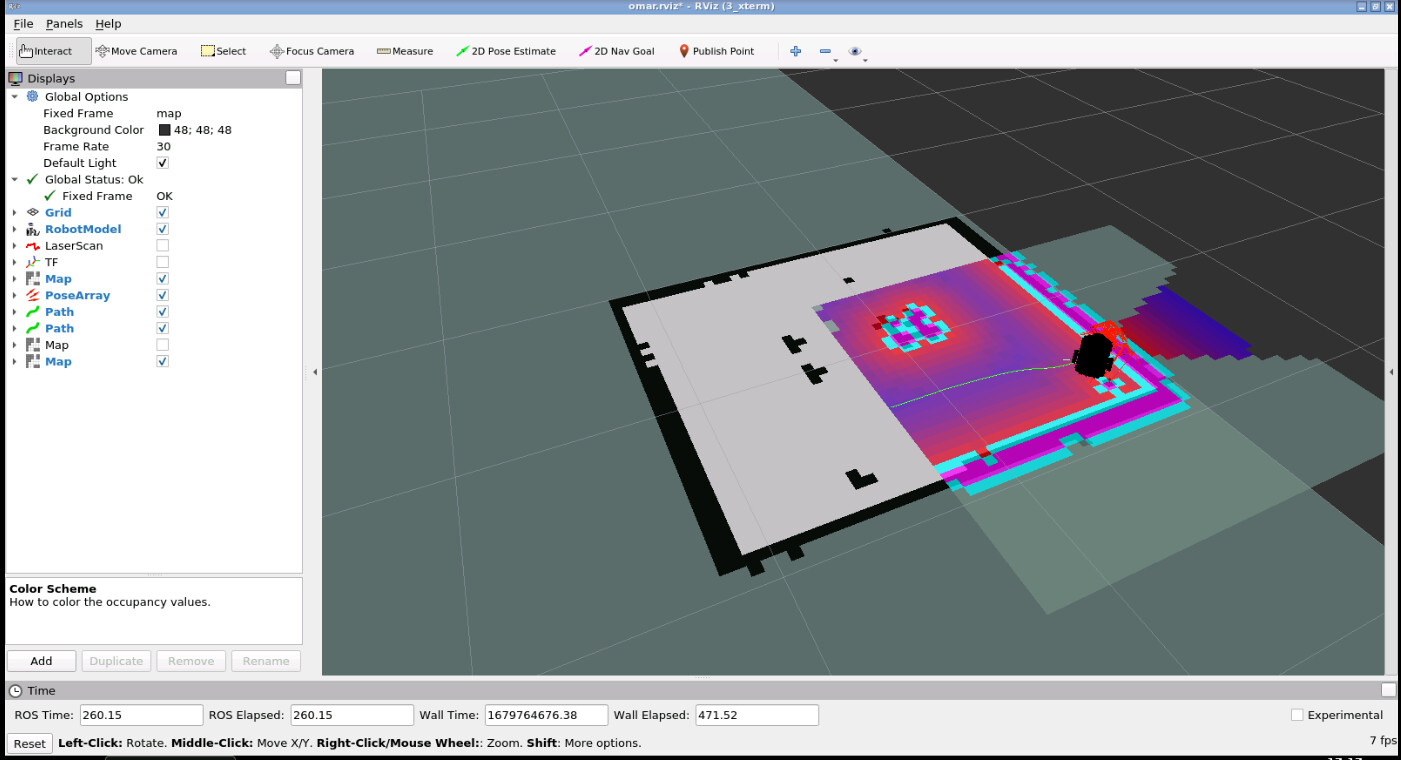
Set inflation_radius between 0.3 and 1.0. 0.001 is way too less. There will be no effect. This is what is causing to visuals to appear on your local costmap on Rviz.
inflation_layer: # name should be same as what you define in global and local costmap plugins
inflation_radius: 0.8
= = = = = = = = = =
local_planner
From where did you get the values for acceleration and velocity for the robot?
The values you have provided are out of range for the (poor) turtlebot !
With those values, the robot would commit suicide !
[Note: Pun indented, not suggesting anything bad.]
I hope you did not try these values on the real robot - it will smash against the wall - probably crash!
Remember: Maximum Velocities for Real Robot TurtleBot: Linear: 0.19m/s & Angular: 0.49rad/s
controller_frequency: 5.0
recovery_behaviour_enabled: true
conservative_reset_dist: 0.2
NavfnROS:
allow_unknown: true # Specifies whether or not to allow navfn to create plans that traverse unknown space.
default_tolerance: 0.1 # A tolerance on the goal point for the planner.
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 0.1
acc_lim_theta: 0.1
max_vel_x: 0.18
min_vel_x: 0.09
max_vel_theta: 0.4
min_vel_theta: -0.4
min_in_place_vel_theta: 0.2
holonomic_robot: false
escape_vel: -0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.02
angular_sim_granularity: 0.02
vx_samples: 6
vtheta_samples: 20
controller_frequency: 20.0
# Trajectory scoring parameters
meter_scoring: true # Whether the gdist_scale and pdist_scale parameters should assume that goal_distance and path_distance are expressed in units of meters or cells. Cells are assumed by default (false).
occdist_scale: 0.1 #The weighting for how much the controller should attempt to avoid obstacles. default 0.01
pdist_scale: 0.75 # The weighting for how much the controller should stay close to the path it was given . default 0.6
gdist_scale: 1.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed default 0.8
heading_lookahead: 0.325 #How far to look ahead in meters when scoring different in-place-rotation trajectories
heading_scoring: false #Whether to score based on the robot's heading to the path or its distance from the path. default false
heading_scoring_timestep: 0.8 #How far to look ahead in time in seconds along the simulated trajectory when using heading scoring (double, default: 0.8)
dwa: true #Whether to use the Dynamic Window Approach (DWA)_ or whether to use Trajectory Rollout
simple_attractor: false
publish_cost_grid_pc: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
escape_reset_dist: 0.1
escape_reset_theta: 0.1
DWAPlannerROS:
# Robot configuration parameters
acc_lim_x: 0.1
acc_lim_y: 0.1
acc_lim_th: 0.1
max_vel_x: 0.18
min_vel_x: 0.09
max_vel_y: 0.18
min_vel_y: 0.09
max_vel_trans: 0.1
min_vel_trans: 0.01
max_vel_theta: 0.4
min_vel_theta: 0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.1
latch_xy_goal_tolerance: false
Great! So, we are definitely heading in the positive direction!
For this you need to play around with controller_frequency and local_planner parameters.
Refer the course notes to understand which parameter does what, and change them respectively.