Hello
When I paste the following command in the Shell, like it is mentioned in the Notebook.
{
source ~/catkin_ws/devel/setup.bash
roslaunch load_params load_params.launch
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge parameter_bridge
}
The code does not work.
It keeps stuck after the roslaunch load_params command
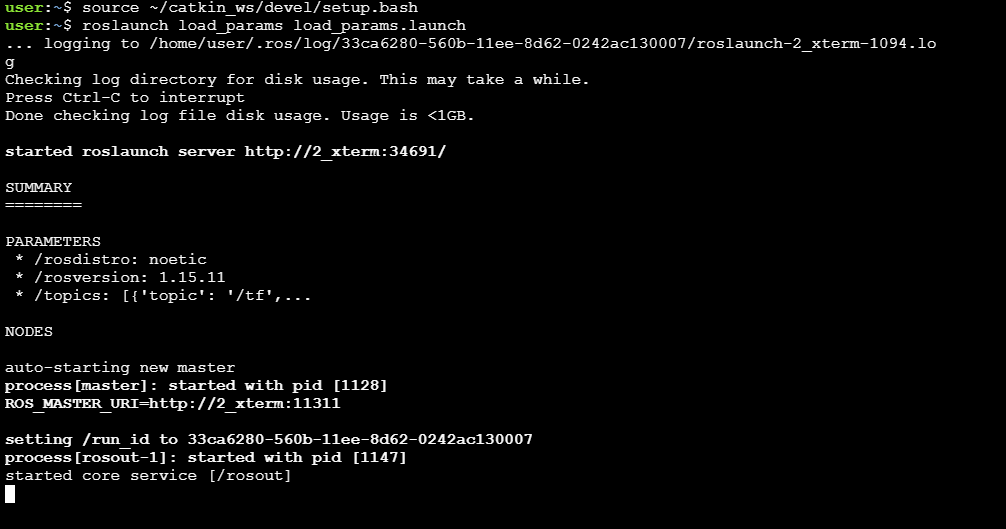
So I can not continue to do the ros1_bridge command.
I tried with the Gazebo Simulation running and without. Same result.
Does someone have an idea, what the problem could be?
I have the most recent rosject updated.
Thanks for any help.
Cheers