Jsnake
April 3, 2025, 12:01am
1
[spawn_entity.py-4] [INFO] [1743638348.217565167] [spawn_entity]: Spawn Entity started
keeps faulting
Hi @Jsnake
What rosject are you working on?
Which command did you run?
Attach full screenshots showing the instructions you followed and the error that occurred.
Jsnake
April 3, 2025, 5:31pm
3
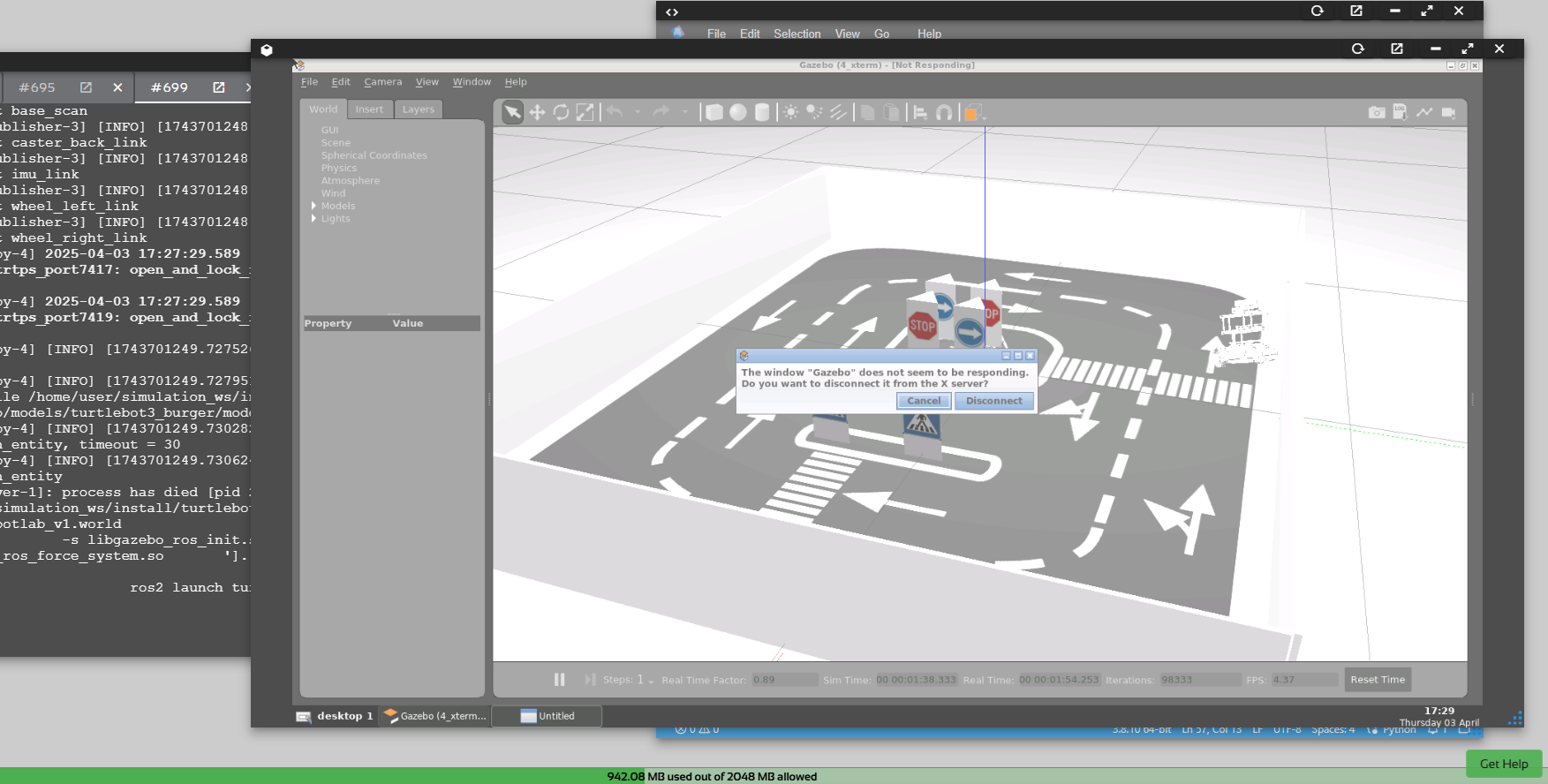
the first rossim, it will run for a few cycles but after closing and opening a few times it gives me this.
ctrl C to close the sim, then re run the command to open. ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
Jsnake
April 3, 2025, 5:31pm
4
_internal
Jsnake
April 3, 2025, 9:00pm
5
whats the process for starting and stopping the sim? at least resetting it. ctrl C? reboot?
Jsnake
April 3, 2025, 9:39pm
6
crtl Z was crashing it, stuck to ctrl C to close and restart sim, looking good.
Ctrl + C is the right key combination.
Thanks for sharing the images. It looks like you are having a problem with the VM’s capacity. Are you running other programs on the side?
Which rosject is this?
Are you still having the problem?
system
April 9, 2025, 9:27am
8
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.